In a manner analogous to the many words for ‘ice’ and ‘snow’ in the Inuit language, Wall-E2 has many words for ‘obstacle’, as follows:
- Wall-E2 gets too close to an obstacle in front
- Wall-E2 gets too close to the currently-tracked wall during tracking operations
- Wall-E2 senses an upcoming wall while tracking the current wall
- Wall-E2 hits something that causes it to get stuck and stop moving forward but the obstacle doesn’t register on the forward sensor
- Wall-E2 gets too close to an obstacle to the rear
Wall-E2 gets too close to an obstacle in front
If Wall-E2 isn’t currently tracking a wall and senses an upcoming obstacle, it stops, backs up, and turns away from the nearest wall. If there is no ‘nearest wall’ it simply turns one way or the other and hopes for the best ;-).
Wall-E2 gets too close to the currently-tracked wall during tracking operations
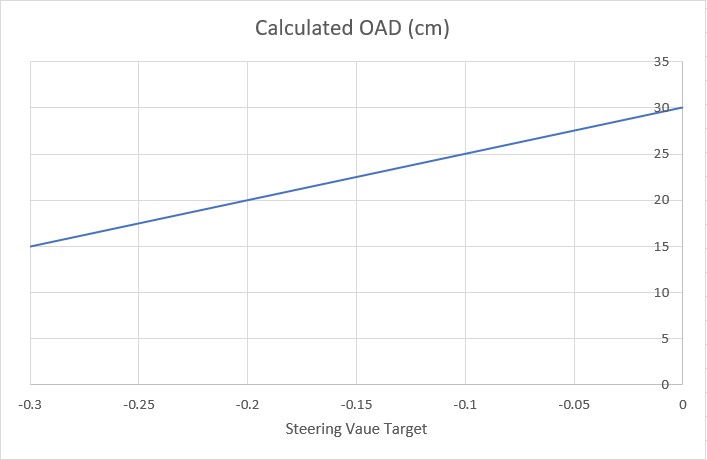
This item in the above list was an unintended consequence of Wall-E2’s new parallel offset tracking ability. After finding the parallel orientation at a distance greater than the desired offset, Wall-E2 makes a cut toward the wall to capture the offset. Unfortunately this also means the forward LIDAR measures the slant distance to the near wall, NOT the distance to any upcoming walls. In some cases this leads Wall-E2 to believe it is running into an obstacle, and instead of continuing the offset capture maneuver, it instead executes an obstacle avoidance maneuver. The fix for this problem is to recognize that when Wall-E2 is deliberately angling toward the wall, and reduce the ‘obstacle avoidance distance’ OAD accordingly. So, for a desired wall offset distance Doff and for a maximum approach angle corresponding to a steering value of -Smax (negative steering values are ‘toward the wall’), the ‘effective obstacle avoidance distance’ OADeff should be less by some factor, (arbitrarily selected here to be 2). This gives OADeff = Doff/2 for a steering value of -Smax, linearly increasing to Doff when S = 0. This is a straight line with slope 1/(2*Smax) and y-intercept of Doff for all S values <= 0. For S > 0, OADeff = Doff. Here’s a graph of the equation for Stgt between 0 & -0.3
Wall-E2 senses an upcoming wall while tracking the current wall
When tracking a wall, which by definition means in MODE_WALLTRACKING with a target steering value between -S and +S, Wall-E2’s desired response to an upcoming wall is to stop and make a 90º ‘spin turn’ away from the currently-being-tracked wall at the desired wall tracking offset value, on the theory that this will place Wall-E2 in the right place to start tracking the next wall.
Wall-E2 hits something that causes it to get stuck and stop moving forward but the obstacle doesn’t register on the forward sensor
This is the classic ‘I’m stuck!’ situation detected by monitoring the mathematical variance of front distance measurements over time, as described in this post. The recovery technique used up to now has been to back up for 1-2 seconds, and then turn 90º However, recovery from this condition can be problematic, as the robot will sometimes run backwards into another obstacle and execute the reverse ‘tractor scare maneuver’ of ‘Cars’ fame. With the addition of a 7th VL53L0X time-of-flight sensor, Wall-E2 can now detect a rear obstacle before it tries to climb it, leading to a better experience for the robot and it’s owner (that would be me). Now the ‘ExecuteStuckRecoveryManeuver()’ function first assesses whether or not there is enough room behind to successfully back up. If there is, it does the following:
- Backs up a predetermined distance using the most suitable (forward or rear) distance sensor
- Makes a 90º turn away from nearest wall
- Moves forward a predetermined distance using either the forward or rear distance sensor
- Makes another 90º turn to parallel the nearest wall again
The idea here is that if Wall-E2 is stuck on a shoe or a chair leg, it might be able to go around it and continue wall tracking. If not, it can repeat this procedure until it eventually works its way around the obstacle.
Wall-E2 gets too close to an obstacle to the rear
This condition rarely/never occurs in isolation; it happens during one of the other obstacle avoidance maneuvers, and only then when Wall-E2 fails to check it’s rear clearance before starting to back up.