This is the second of (hopefully) many posts on my project to add modern vision processing to my autonomous wall-following robot. The first post is here.
Lots of changes since my first post. I discovered that my 8.4-to-5V LDO regulator board wouldn’t reliably drive the Raspberry Pi5, so I had Grok look around for other options. He found a step-down converter module at Pololu advertising 85+% efficiency and a much cleaner output. I have it on order so we’ll see.
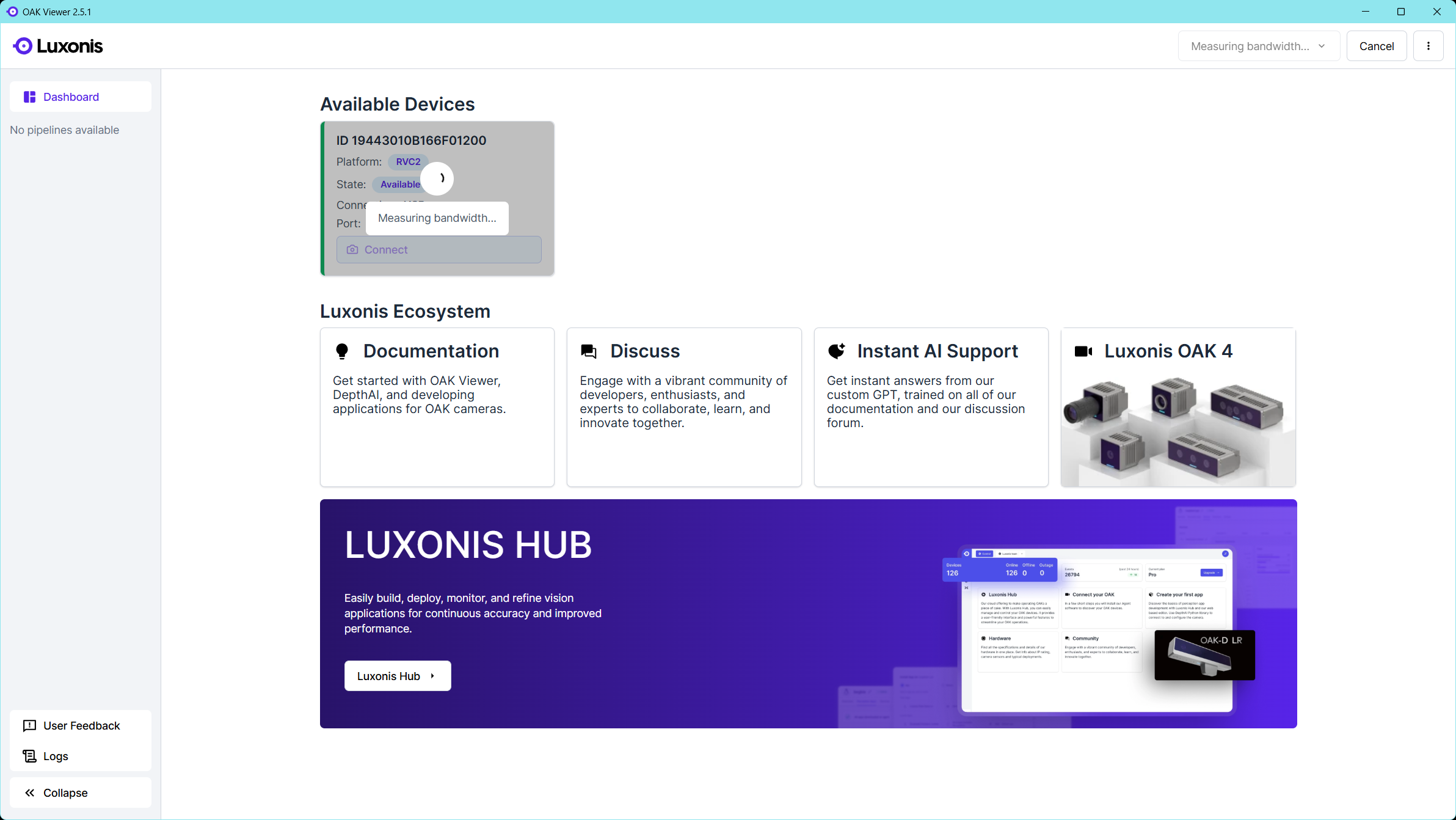
I also struggled to get the Luxonis OAK-D Lite stereo camera working on my Pi5/Ubuntu 24.04LTS setup. Previously we had gotten it to work with the Pi5 running the Raspberry OS, but getting it to work with the Ubuntu OS was a lot more challenging. This effort also ran afoul of Grok’s complete inability to realize that it is in a hole and to stop digging. We went through dozens of Python scripts designed to get the camera to connect and show some data (I was connecting to the RPi5 via SSH from my windows box, so showing images wasn’t possible), and they all failed due to one subtle problem or another. After several days of getting nowhere I finally called a halt, took a couple of days off, and came back determined to start over from first principals. Instead of using Grok, I started from scratch with some web searches to find other successful implementations of The OAK-D Lite camera. At the Luxonis ‘Documentation’ site I found this page describing a viewer for the OAK-D Lite (and other) cameras. The OAK Viewer is available for windows and *nix OS, so I decided to start by trying to get images from the camera using the Windows version to bypass all the annoyances associated with peripheral handling in Linux. This turned out to be pretty much plug-and-play, and immediately the OAK-D camera showed up in the list of available devices. When I clicked on ‘Connect’ instead of connecting immediately the app immediately started measuring the available bandwidth of the USB connection as shown below.
After several USB connect/disconnect cycles, I got this display:
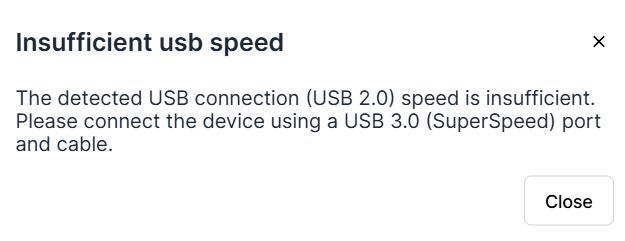
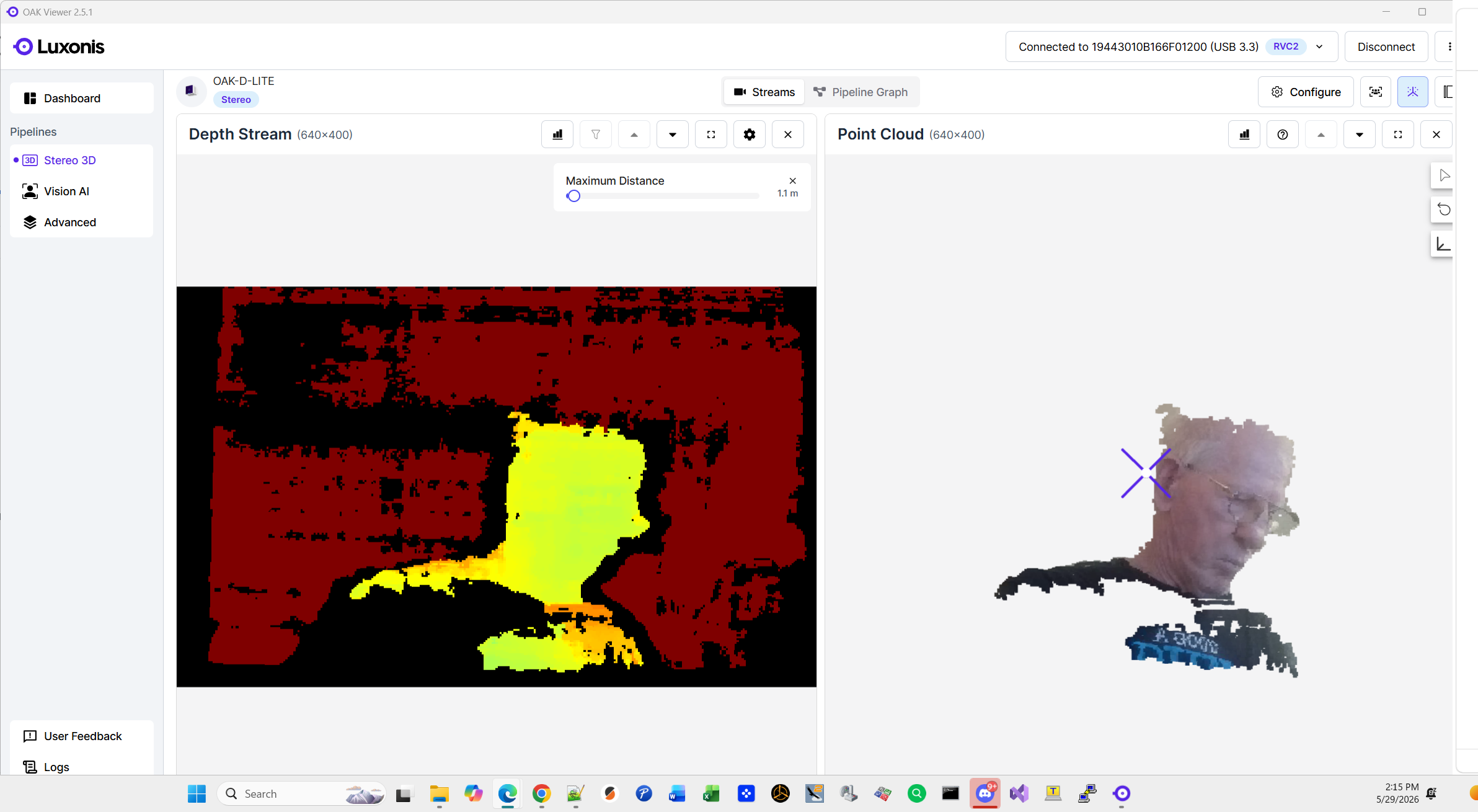
Oops! I hadn’t even considered the USB cable/connector bandwidth issue – and neither had Grok. For convenience I had plugged the camera cable into my USB hub, which is definitely not ‘super speed’ whatever the heck that is. After some cable and connector switching, I found that a heavy-duty Type-C cable connected directly to a Type-C connector on my Dell XP15-9530 laptop allowed the bandwidth check to succeed, and now I got some images showing up on my Windows 11 display – yay!
So the moral of this story is – the Grok path was never going to work because Grok never considered that cable/usb connector bandwidth might be an issue. By going back to ‘first principals’ and taking the simplest possible path to a working camera/display configuration with a known-good Windows 11 app, I was able to immediately identify a completely unknown (to me and to Grok) – but fatal – stumbling block – USB cable/connector bandwidth. Grok has no sense of time, so every iteration was just like a puppy chasing a dog – willing to chase that ball an infinite number of times without ever thinking about the fact that ‘chasing the ball’ and ‘progress toward the goal’ aren’t necessarily the same thing. It took a mere mortal like me to say “whoa – this isn’t getting us anywhere – maybe a different approach?”
Now that I had demonstrated that the OAK-D Lite camera and the proper cable/connector combination worked – at least on Windows 11, I had a ‘known-good baseline’ that I could always retreat to, I started working on getting the OAK-D Lite camera working on the RPi5/Ubuntu camera with the same OAK Viewer application (but in the Linux flavor).
This turned out to be another maze to navigate. The Luxonis site has detailed instructions for the Linux version of the viewer, but it involves installing from a *.deb package, which unfortunately is targeted at the amd64 64-bit chip ecology – but the RPi5 uses arm64 – a different animal entirely. When I tried to install the ‘viewer.deb’ package, I got the following errors:
The following packages have unmet dependencies: oak-viewer:amd64 : Depends: libgtk-3-0:amd64 but it is not installable Depends: libnotify4:amd64 but it is not installable Depends: libnss3:amd64 but it is not installable Depends: libatspi2.0-0:amd64 but it is not installable Depends: libdrm2:amd64 but it is not installable Depends: libgbm1:amd64 but it is not installable Depends: libxcb-dri3-0:amd64 but it is not installable Recommends: pulseaudio:amd64 or libasound2:amd64 but it is not installable
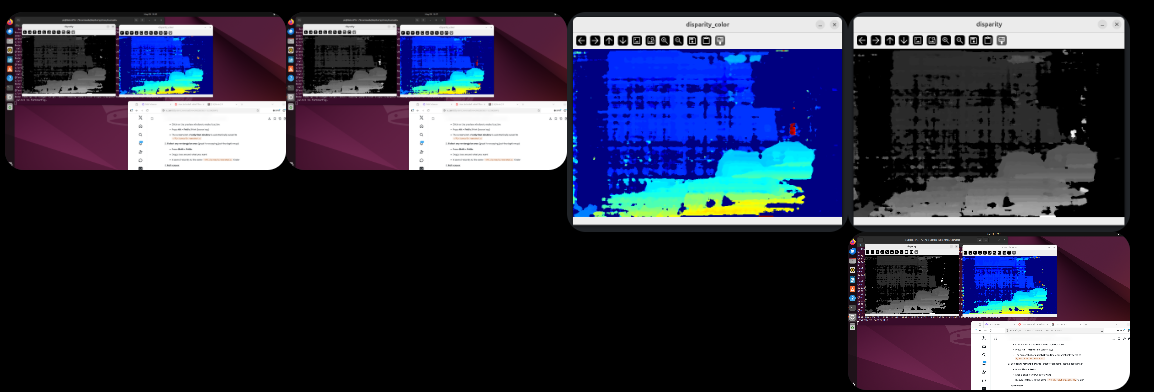
It was at this point that I re-engaged Grok and started to make real progress. Grok immediately identified the Pi5/Ubuntu-compatible DepthAI Python library as the way to go and guided me through the installation process. Fortunately, this had a happy ending, even though there were several ‘gotchas’ along the road. However, since I knew for a fact that the hardware (and USB cable) were ‘known good’ elements due to my Windows 11 work, I was pretty sure any detours were software-only. After working my way through the various twists and turns with Grok’s help, we got to here – success!

Getting from my easy Windows 11 camera demo to the RPi5/Ubuntu camera demo would have been improbable if not impossible for me to do without Grok’s help. I might have gotten there, but it would have involved days/weeks of web searches and forum posts at the very least. I believe this is where Grok really shines – a definite problem with a definite end, with very few (none in my case) outside corrupting factors like the USB bandwidth/cable issue.
Interestingly, after getting the Pi5/Ubuntu/OAK-D Lite combination working, I asked Grok to help me find an easier way to take screen shots on the Pi5, and Grok obliged by offering the ‘Flameshot’ app as a substitute for the built-in Gnome keystroke shortcuts. And then we went down another rabbit-hole, and I ended up wasting an hour or so trying to get Flameshot and Gnome to work and play well together, only to wind up removing Flameshot and learning how to better use the Gnome built-in shortcuts.
So Grok is definitely a mixed blessing, and I cannot imagine how a younger less-experienced engineer would do without the (literally) lifetime’s worth of experience I have in troubleshooting hardware/software systems. When I was that young less-experienced engineer half a century ago I was trying to troubleshoot a RF EMI problem with a small electronics device made by Motorola. Eventually my supervisor suggested that I travel to Motorola and work with their engineers to figure out the problem. I did, and over the space of two days a very experienced Motorola engineer taught me the ‘divide and conquer’ method of troubleshooting that I use to this day. When Grok inevitably goes down a rabbit-hole with this young engineer in tow, who’s going to be there to throw them a life-line?