Posted 26 June 2022,
Got an interesting request from a fellow Duplicate Bridge player the other day. I was asked if I could somehow create a way to produce precise cubes of modeling clay. Of course, since I am the proud owner of not just one, but two 3D printers (a FlashForge Creator Pro II IDEX and a Prusa MK3S), I said “sure, no sweat! How many would you like?”
As usual, once I got home and started playing around with the project, I realized that I had, once again, jumped into the pool without first checking to see if there was any water. Turns out that the garden variety modeling clay is pretty gooey stuff, and sticks to EVERYTHING, including 3D printed PLA/PETG forms. But hey – a project that just falls together without any drama isn’t much of a project, is it?
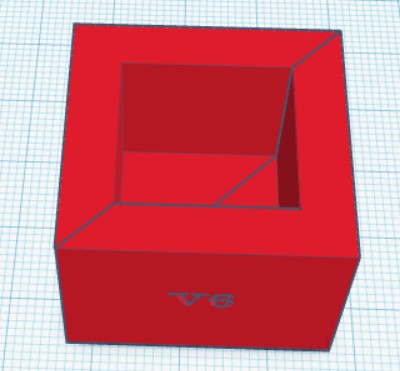
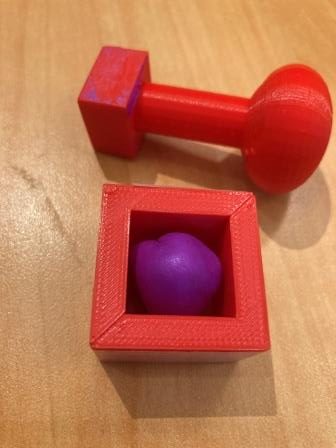
Anyway, I adopted my usual tactic of “fail quickly, fail often” (Space X has nothing on me!) to home in on something that might produce what I was after. My first thought was a simple rectangular cylinder with inner dimensions matching the desired clay cube dimensions, combined with a press that just barely slides into the cylinder, as shown below:

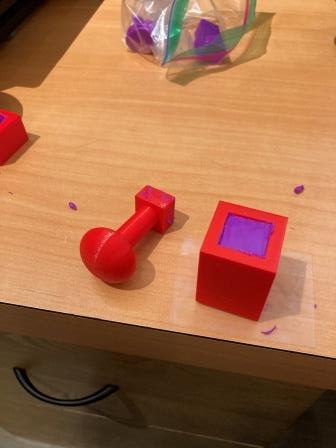

This worked OK, but had some drawbacks. The original press with just a simple cylindrical handle really didn’t allow for much pressure without hurting my hand, so I added a ‘squashed ball’ top to make that easier, and added some length to the extrusion die to produce a longer extruded clay blank, which I intended to cut to length with an Exacto knife. Again, this worked OK, but not spectacularly; as can be seen in the last of the above photos, the extruded blank exhibited some grooves created by some errant pieces of filament.
My next thought was to use a long rectangular cylinder not as an extrusion die, but just as a removable form; after pressing clay into the form with the press, the form would be cut away to access the clay blank, which would then be cut to length as before. However, this would require a new form for every blank, so that wasn’t great. Then I hit upon the idea of making the form out of nested pieces, as shown below:
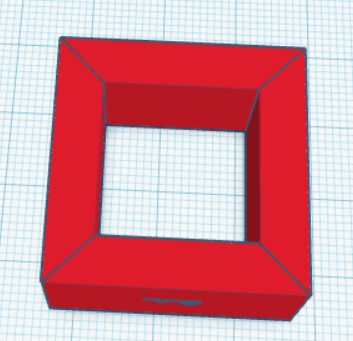
While the print turned out very well, the result of having four removable sides was kind of a mess – very difficult to get together (and then somehow bind/tape the thing together)

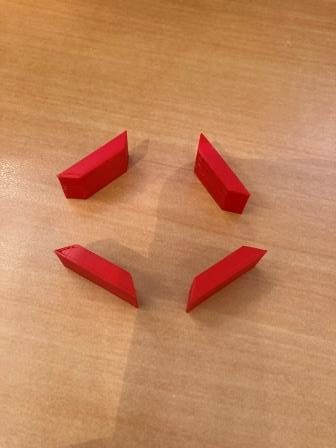
Next I tried a similar ‘removable form’ idea, but with just two removable pieces rather than four, and an end-piece as well.
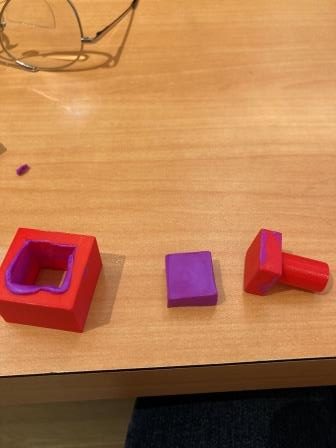
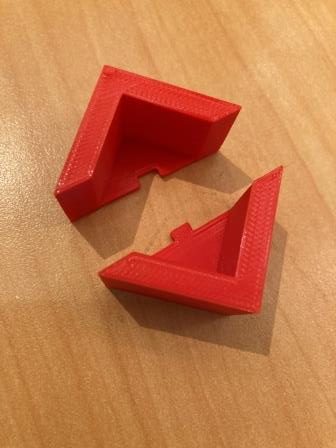
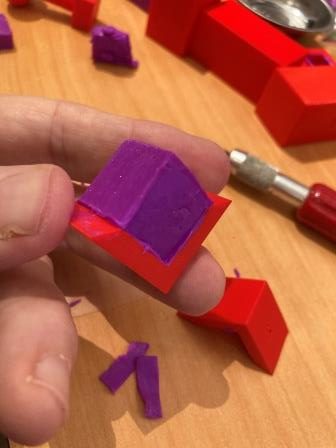
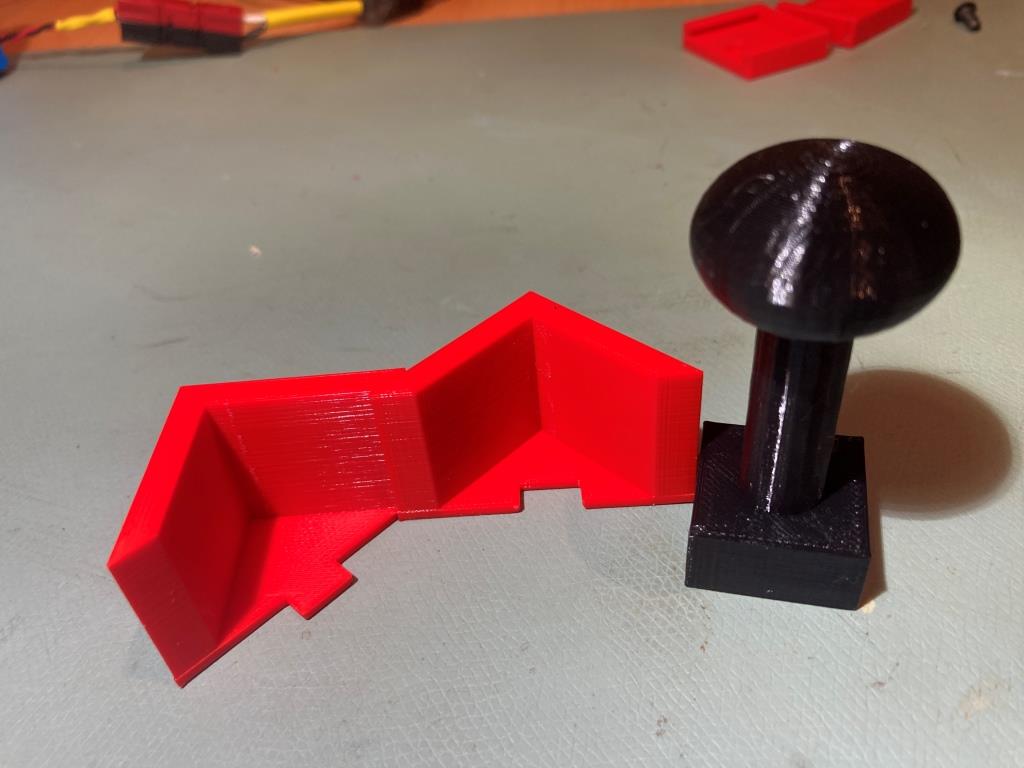
This didn’t work very well either, because the two pieces could easily slide against each other, making it impossible to keep the desired shape. So, I tried again but used a notch and cutout feature to keep the pieces aligned, as shown below
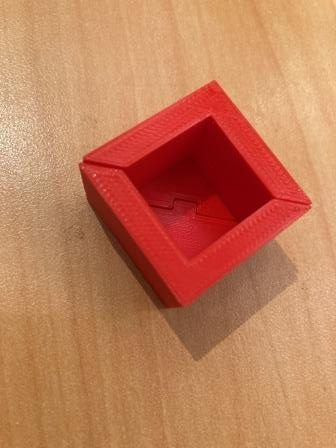
This worked well enough that I decided to try forming a cube with my Sculpey clay and my press. To start, I wrapped the form with nylon filament strapping tape to withstand the press pressure, and started loading clay balls into the form. This actually worked fairly well, but when I pulled the form apart, the clay stuck to the walls and deformed badly.
Back to the web to research release agents for modeling clay, and found this site that specifically recommended water as a release agent for Sculpey clay – yay!
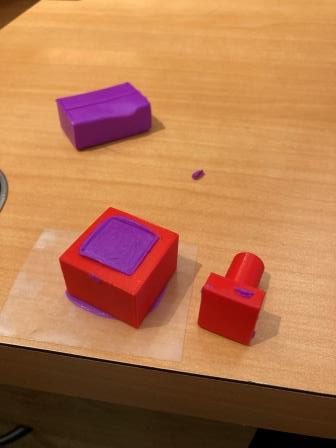
So, I tried again to form a cube, as shown below:






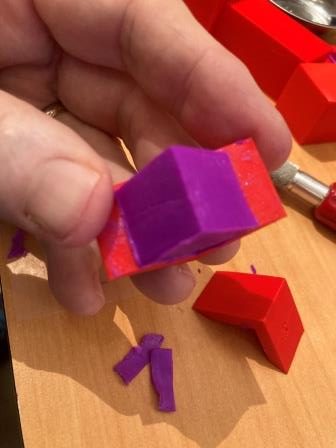





This time I got a pretty nice cube, with each side almost exactly 19mm or 3/4″ – yay!
So at this point it’s time to consult with my bridge club friend and find out if this really what they want. Stay tuned!
29 July 2022 Update:
Got some feedback from my ‘customer’ today. She liked the split-form implementation, but would like to try a 1x1x1 inch cube instead of the 3/4×3/4×3/4 we started with. So, I went back to TCad and ‘whipped up’ (well, for me, ‘whipping up takes a while…) the new version shown below:

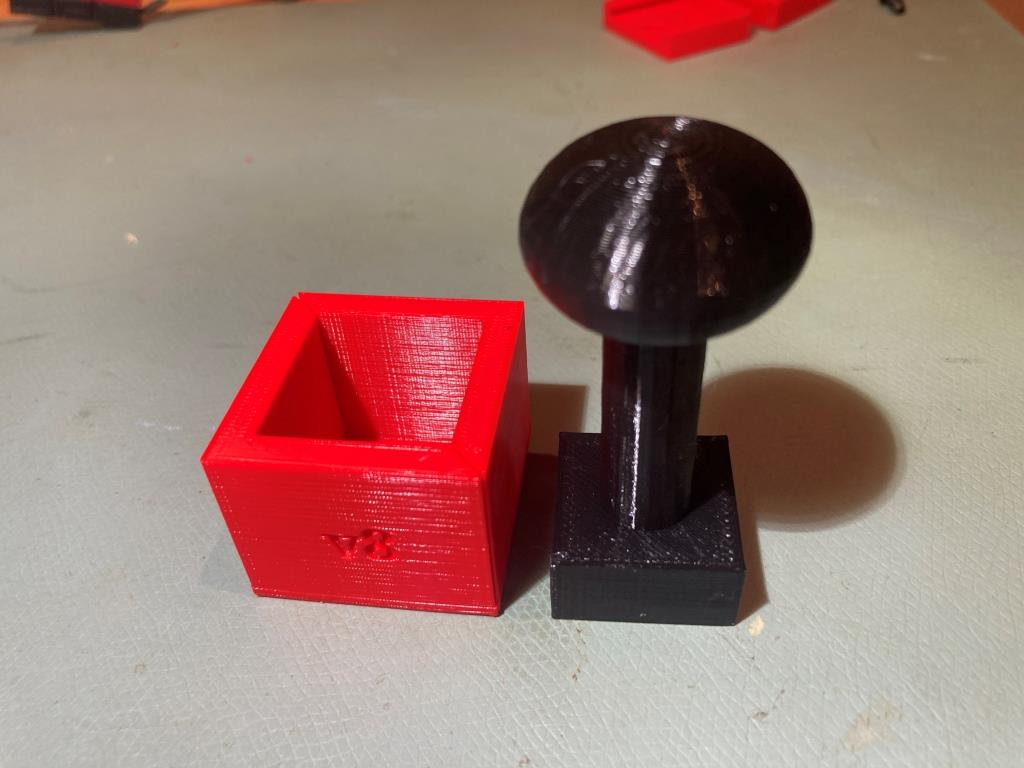
Frank