Posted 15 July 2022,
After getting everything working (or so I thought) in my sandbox, I started running into problems again with wall tracking. It just wasn’t very smooth at all. So, I decided to create a part-task version of my Wall-E3 code (WallE3_WallTrackTuning.ino) to just tackle PID tuning for left/right wall tracking. this version allows PID and offset values to be entered interactively to facilitate faster tuning. After a number of runs, I wound up with a PID set of (200,20,0). This produce a very nice, smooth tracking behavior.
In addition, I went back through all my code and re-educated myself on exactly how my current wall offset capture algorithm developed and whether or not it was, in fact, what I wanted. I started by diagramming all (I hope) relevant initial orientation and offset cases, as shown in the following Visio chart.
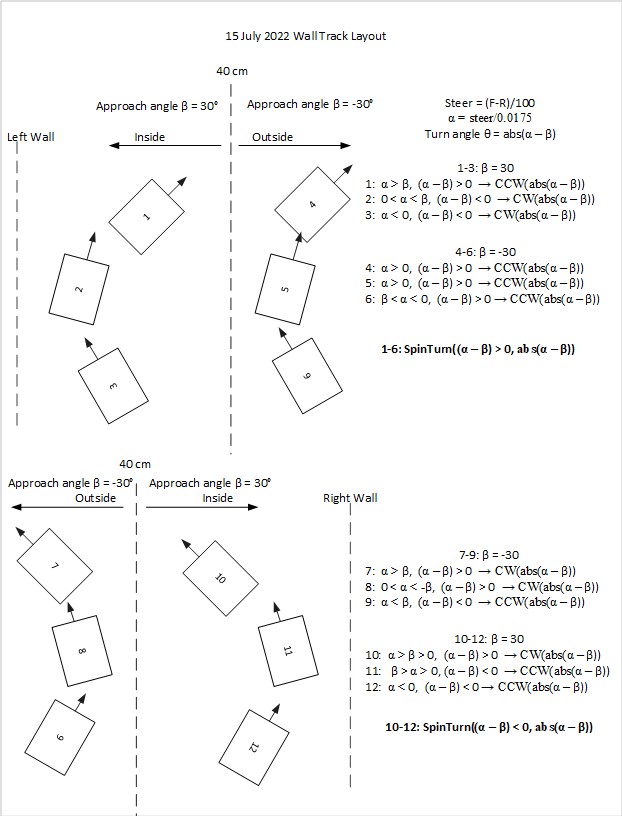
In the above figure, four basic configurations are diagrammed; The first two are for left-side tracking with the robot starting in three different configurations inside the desired 40cm tracking offset, and three more outside the tracking offset. The second two are the same as the first, but for right-side tracking.
The algorithm is based on knowing the robot’s orientation w/r/t the local wall, which is determined by the expression ‘Steer = (Front – Rear)/100’, implemented in the Teensy 3.5 MCU that manages the VL53L0X lidar array. This result is available to the main program as ‘glLeftSteeringVal’ and ‘glRightSteeringVal’. The steering values are proportional to the orientation angle in degrees, calculated as OrientDeg = steerval/0.0175.
Expressions for which way and how much to turn to achieve the desired capture approach angle of +/- 30 degrees were determined for each of the 12 starting configurations shown (numbered 1-12 in the above figure). An examination of the resulting expressions showed that they could be collapsed down into just two different calls to the ‘SpinTurn(isCCW, numdeg)’ subroutine – one for left-side tracking, and one for right-side tracking, as shown by the bold-face expressions above.