Posted 04 December 2022,
A few days ago I described my revisit to WallE3’s ‘parallel orientation search’ feature, a feature that had been more or less discarded due to poor performance. As described in this post and this post, I have been able to obtain much better accuracy and precision from the ST Micro VL53L0X sensor arrays.
With this in mind, I decided to revisit my old ‘Rolling Turn’ algorithm, to see if I could get it’s performance up to the point where it could be used instead of ‘Spin Turn’ for the ‘parallel find’ maneuver. The Spin Turn maneuver involves rotating one set of wheels backwards and the other forwards to effect a ‘spin in place’ action. The Rolling Turn maneuver involves rotating both sets of wheels in the same direction, but at different speeds. My going-in assumption was that a rolling turn should allow more accurate control of the turn rate, as there should be less acceleration involved.
In preparation for this project, I went back to the web and read some more about PID tuning. This time I found this well-written and informative post by ‘marco_c’ – Thanks marco!
I had dropped the original ‘RollingTurn’ function from the code some time ago, so I started this experiment by copying SpinTurn() and adapting it to move both sets of wheels in the same direction (forward in this case) instead of in opposite directions. The conversion from SpinTurn and RollingTurn took surprisingly little effort, as everything but the motor direction code is pretty much the same.
I created a part-task program by creating a new ‘WallE3_RollingTurn_V1’ arduino project in VS2022 Community, and then copying my WallE3_WallTrackTuning_V4. The WallE3_WallTrackTuning_V4 project is also a part-task test vehicle, and as such had almost all the required parameter entry code already in setup().
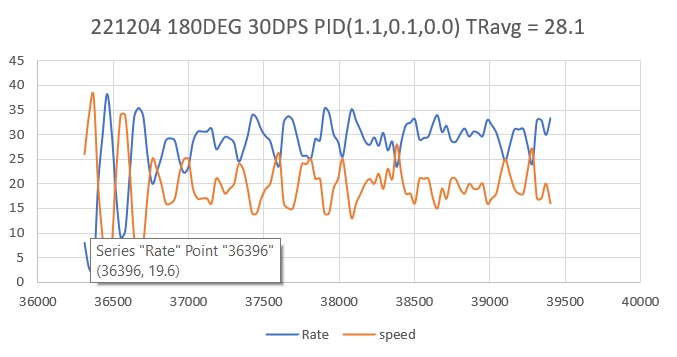
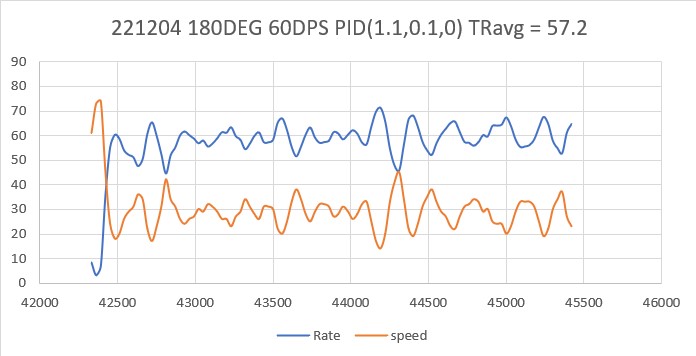
After working my way through the usual number of mistakes, I finally got the project working smoothly. I copied captured telemetry output to Excel and used it’s excellent plotting facilities to investigate possible PID triplet combinations. After a day or so of work, I finally homed in on a triplet PID(1.1, 0.1, 0) as providing a pretty nice, smooth turning action for a 180º turn at 30º/sec. Then I tested the same configuration using both a 60º/sec and a 90º/sec commanded turn rate. As shown in the plots below, the robot did well in all three of these conditions:
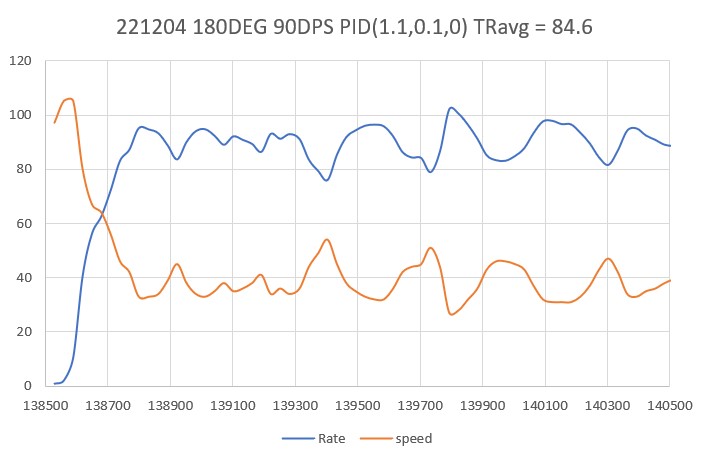
Here’s a short video showing the 180º turn at 90º/sec configuration:
My test program as described above only handles forward motion CCW & CW turns. If I decide to put this feature back into WallE3’s main codebase, I’ll have to expand it a bit to handle the backward motion case as well.
05 December 2022 Update:
I modified the RollingTurn() function to accommodate both forward and backward motion, and both CW & CCW turns, so four cases.
Also, as I was doing this, it occurred to me that I might want to revisit my ‘SpinTurn()’ function in light of my better understanding of PID tuning. Maybe I can get SpinTurn to operate a little more smoothly.
Stay tuned,
Frank