Posted 17 January 2024
I recently re-started flying Condor Soaring Simulator after a long absence, and renewed an old interest in using the open-source XCSoar navigation software for external TAT/AAT planning and navigation. XCSoar runs on PC’s, Android phones/tablets, and Linux and is widely used in RL (real-life) and Condor soaring.
I started out by running XCSoar 7.42 on a cheap Android M10 tablet, connected via Bluetooth to Condor running on my Windows 10 PC. Then I created a small AAT task in the default Slovenia scenery and ran a series of test flights to see how XCSoar did. I documented my results in this post and this one.
As a result of my study, I identified some bugs and other issues on the XCSoar forum, and found out that the XCSoar software is actually written in C++ on Linux, and then cross-compiled for the various supported platforms. I’ve done a fair bit of work in C++ and in Linux, so this got me thinking that maybe I could resurrect my old Linux skills and play around with the XCSoar source code a bit. So I dug out my old moth-balled Dell Precision M6700 laptop, loaded up Ubuntu 24.0 LTS, cloned the XCSoar repo, compiled it on my Linux box, and voila! I was in business!
Well, not quite. In order to use Condor on my Windows PC as the test bed for XCSoar software mods, I had to somehow connect Condor’s NMEA output to the NMEA input to the XCSoar program running on my Linux box. This turned out to be non-trivial and involved a lot of web searching, tearing of hair (what little I have left), and gnashing of teeth, but in the words of my Nebraska cousins “We gotter done!”
This post, then is a way of capturing the surprisingly easy (once you know the magic) process of connecting the NMEA output from Condor running on my Win 10 PC to the NMEA input of XCSoar running on my Linux box.
As it turned out, I had already solved (sort of) the first half of the problem, getting NMEA data from Condor out of my Win 10 PC. When I first (re)started playing with XCSoar, I found some posts describing how to connect Condor NMEA ouput to XCSoar running on the same PC, using a nice utility called ‘Virtual Serial Ports Emulator’ (VSPE), and this actually worked very well – except for one tiny little problem; in order to make any adjustments in XCSoar, I had to ALT-TAB out of Condor over to XCSoar, and that meant ‘flying blind’ (literally) while working with XCSoar – not a good thing. I solved this problem by instead route Condor NMEA output to a Bluetooth virtual serial port connected to an Android M10 tablet.
The procedure for connecting Condor on my Win 10 PC to XCSoar running on a Linux box is:
- Connect Condor NMEA output to a TCP port on the Win 10 Box
- Use ‘socat’ on the Linux box to connect the Win 10 TCP port to XCSoar
Connect Condor NMEA output to a TCP port on the Win 10 Box:
This connection is composed of two legs, both using VSPE; the first one defines a virtual serial port to which Condor NMEA output can be directed. The second one creates a connection between the virtual serial port defined in the first step to a Win 10 TCP port. The screenshot below shows both these legs.
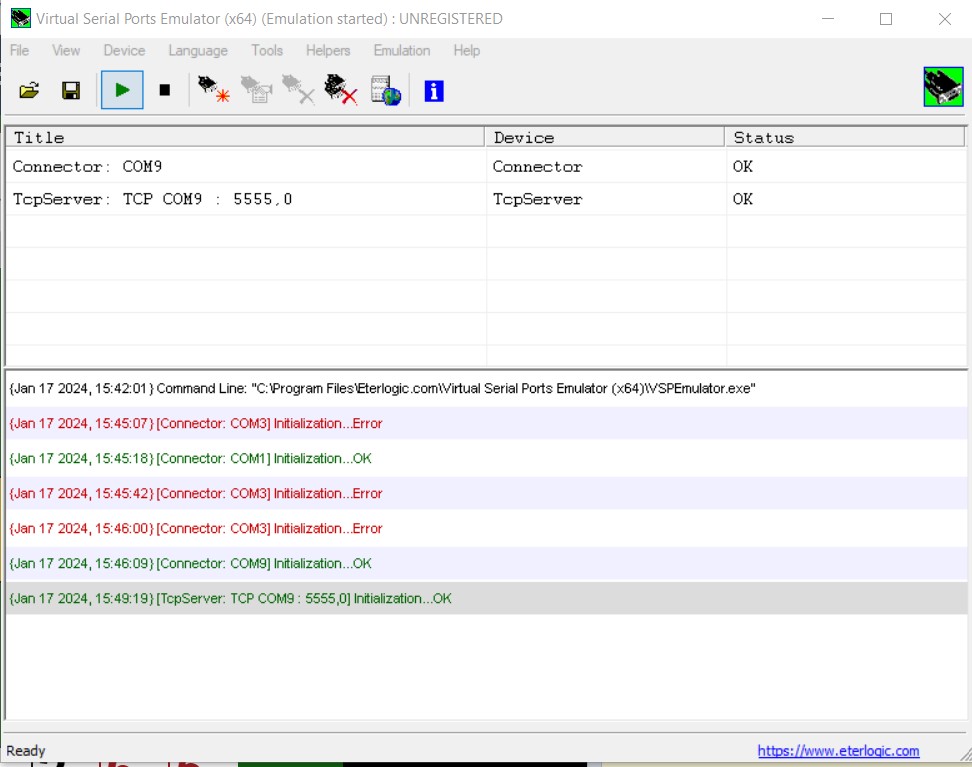
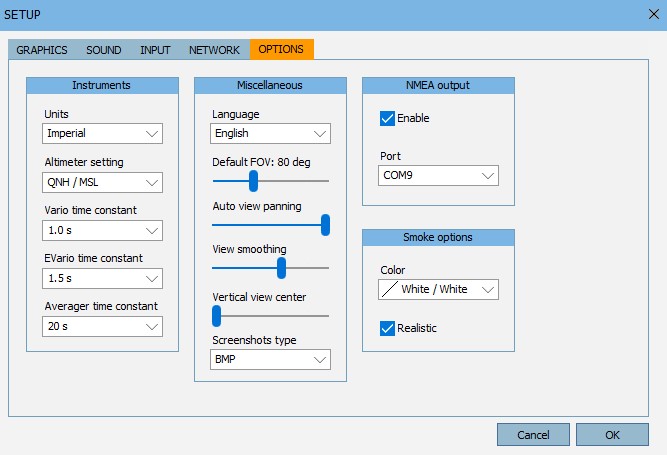
Any unused COM port number may be defined here. Once this is done, connect Condor NMEA output to this port by going to Setup->Options in Condor, checking the ‘Output NMEA’ box, and then selecting the port number defined above, as shown below:
Use ‘socat’ on the Linux box to connect the Win 10 TCP port to XCSoar:
When I first started this adventure, I found references to the Linux ‘socat’ command while Googling for things like “Connect Linux Box to Win 10 PC”. Then I started reading about ‘socat’ in particular, and although I could understand that ‘socat’ connected two ‘things’ (where a ‘thing’ could be a serial port, a TCP port a UDP port, a website, etc), it wasn’t easy to figure out how to use it for my application. Finally I ran across this tutorial, which guided me through a series of example socat applications.
After playing with the examples for a while, I realized I should be able to use the ‘STDIO’ socat example to connect the already existing TCP port on my Win 10 box to STDIO in a Linux console terminal and watch NMEA data flow through. So I fired up Condor on my PC and selected ‘Free Flight’. In the ‘NOTAM’ tab, I selected the ‘Airborne’ start option (I believe this is the default), and then selected ‘Start Flight’. Condor outputs NMEA sentences even when the glider is suspended in mid-air, waiting to start flying, so this is a convenient way to test connections. Then on my Linux box I opened a terminal window and typed in the command shown at the top of the following image:
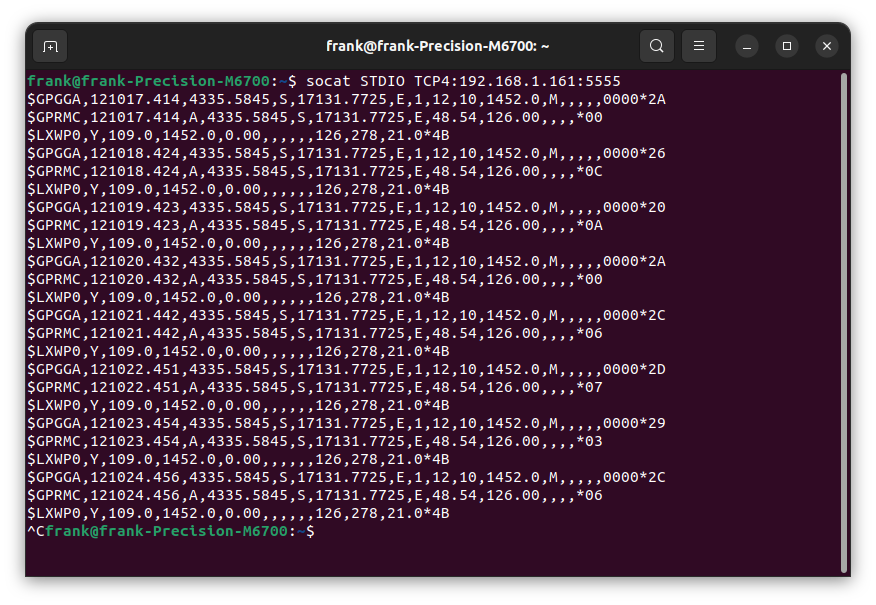
When I executed the command, I started getting NMEA sentences from Condor – yay!!
Now that I verified that I can connect to a Linux terminal window from Condor running on my Win10 PC, the remaining piece is to change the destination from a terminal window to XCSoar’s GPS data input and then configure XCSoar to accept GPS data from that port. To do this I executed the following ‘socat’ command on a terminal window in Linux:
|
1 |
frank@frank-Precision-M6700:~$ socat UDP:localhost:4353 TCP4:192.168.1.161:5555 |
This establishes a connection between a randomly selected UDP port on the Linux box and a TCP port on my PC. The PC TCP port number is the one selected above connecting COM9 to a TCP port, and the UDP port on my Linux box was just a random unused port number.
Then I launched XCSoar on my Linux box and navigated to Config–>Devices, as shown in the following screenshot. Device A is defined as UDP port 4353, the port number selected above.
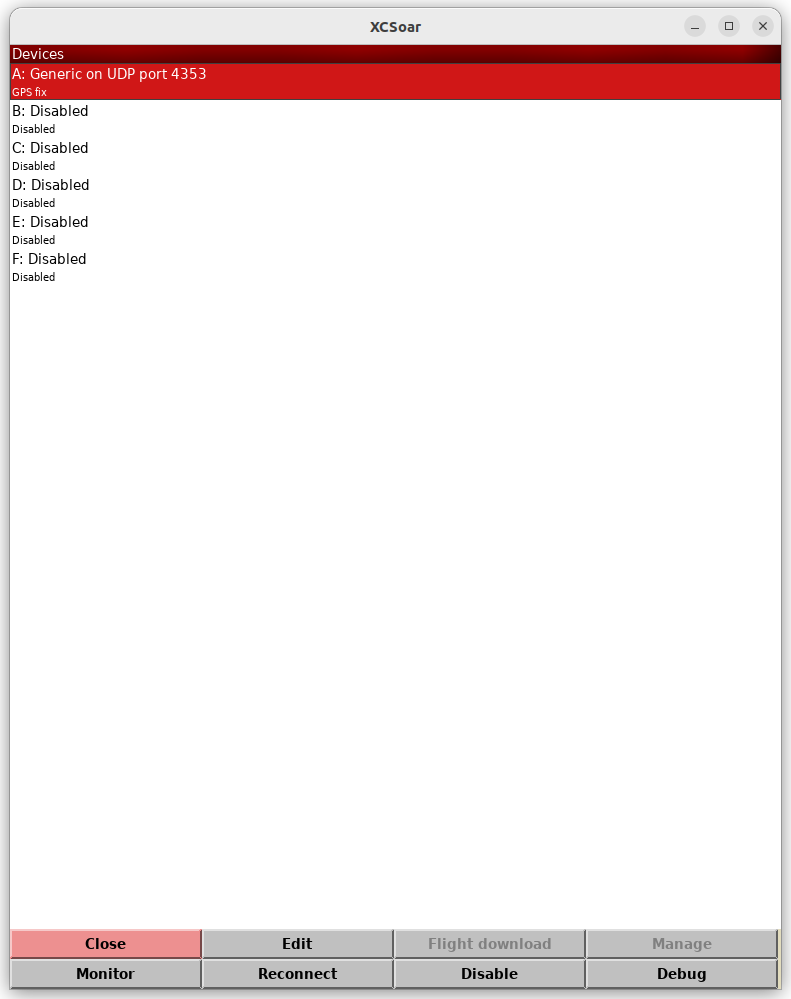
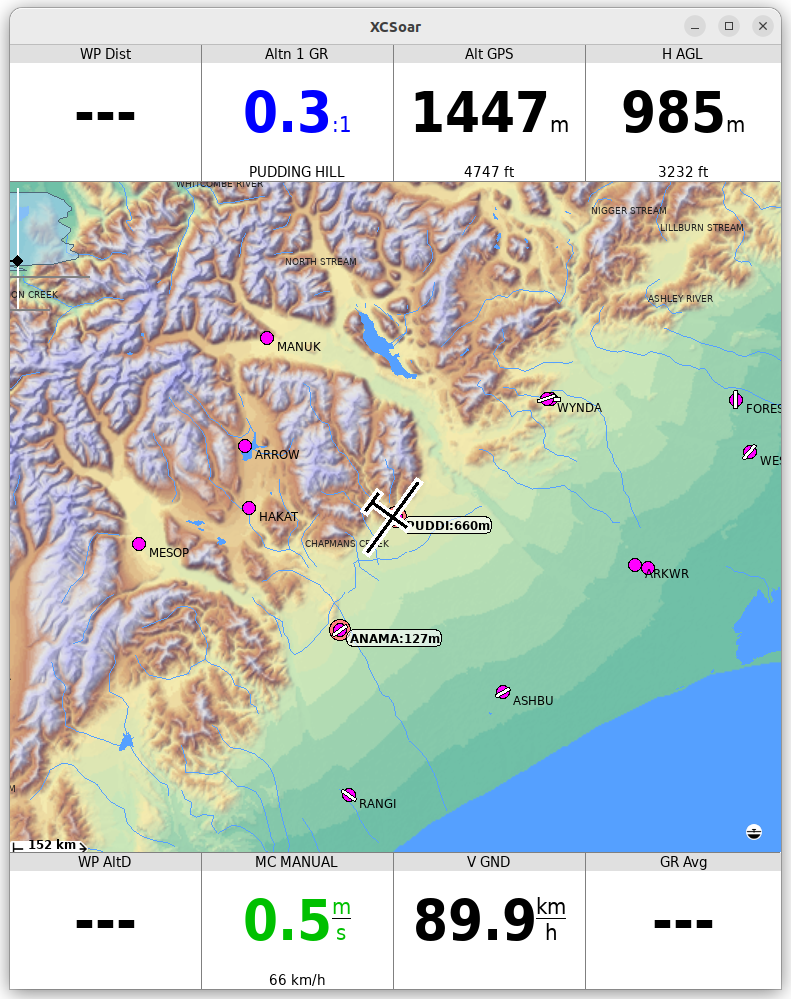
This establishes the end-to-end connection between Condor running on my Win10 PC to XCSoar running on my Linux box. With this established, XCSoar shows ‘GPS fix’ as the status for Device A, and the main screen shows the glider’s location in the selected scenery, as shown below:
Stay Tuned,
Frank