Posted 18 June 2017
In my last post on this subject, I showed how I could speed up ADC cycles for the Teensy 3.5 SBC, ending up with a configuration that took only about 5μSec/analog read. This in turn gave me some confidence that I could implement a full four-sensor digital BPF running at 20 samples/cycle at 520Hz without running out of time.
So, I decided to code this up in an Arduino sketch and see if my confidence was warranted. The general algorithm for one sensor channel is as follows:
- Collect a 1/4 cycle group of samples, and add them all to form a ‘sample_group’
- For each sample_group, form I & Q components by multiplying the single sample_group by the appropriate sign for that position in the cycle. The sign sequence for I is (+,+,-,-), and for Q it is (-,+,+,-) .
- Perform steps 1 & 2 above 4 times to collect an entire cycle’s worth of samples. As each I/Q sample_group component is generated, add it to a ‘cycle_group_sum’ – one for the I and one for the Q component.
- When a new set of cycle_group_sums (one for I, one for Q) is completed, use it to update a set of two N-element running sums (one for I, one for Q).
- Add the absolute values of the I & Q running sums to form the final demodulated signal value for the sensor channel.
To generalize the above algorithm for K sensor channels, the ‘sample_group’ and ‘cycle_group_sum’ variables become K-element arrays, and each step becomes a K-step loop. The N-element running sum arrays (circular buffers) become [K][M] arrays, i.e. two M-element array for each sensor (one for I, one for Q).
All of the above sampling, summing, and circular buffer management must take place within the ~96μSec ‘window’ between samples, but not all steps have to be performed each time. A new sample for each sensor channel is acquired at each point, but sample groups are converted to cycle group sums only once every 5 passes, and the running sum and final values are only updated every 20 passes.
I built up the algorithm in VS2017 and put in some print statements to show how the gears are turning. In addition, I added code to set a digital output HIGH at the start of each sample window, and LOW when all processing for that pass was finished. The idea is that if the HIGH portion of the pulse is less than the available window time, all is well. When I ran this code on my Teensy 3.5, I got the following print output (truncated for brevity)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 |
RunningSumInsertionIndex = 63 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 0 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 1 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 2 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 3 RunningSumInsertionIndex = 0 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 0 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 1 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 2 SampleSumCount = 0 SampleSumCount = 1 SampleSumCount = 2 SampleSumCount = 3 SampleSumCount = 4 CycleGroupSumCount = 3 RunningSumInsertionIndex = 1 SampleSumCount = 0 SampleSumCount = 1 |
And the digital output pulse on the scope is shown in the following photo
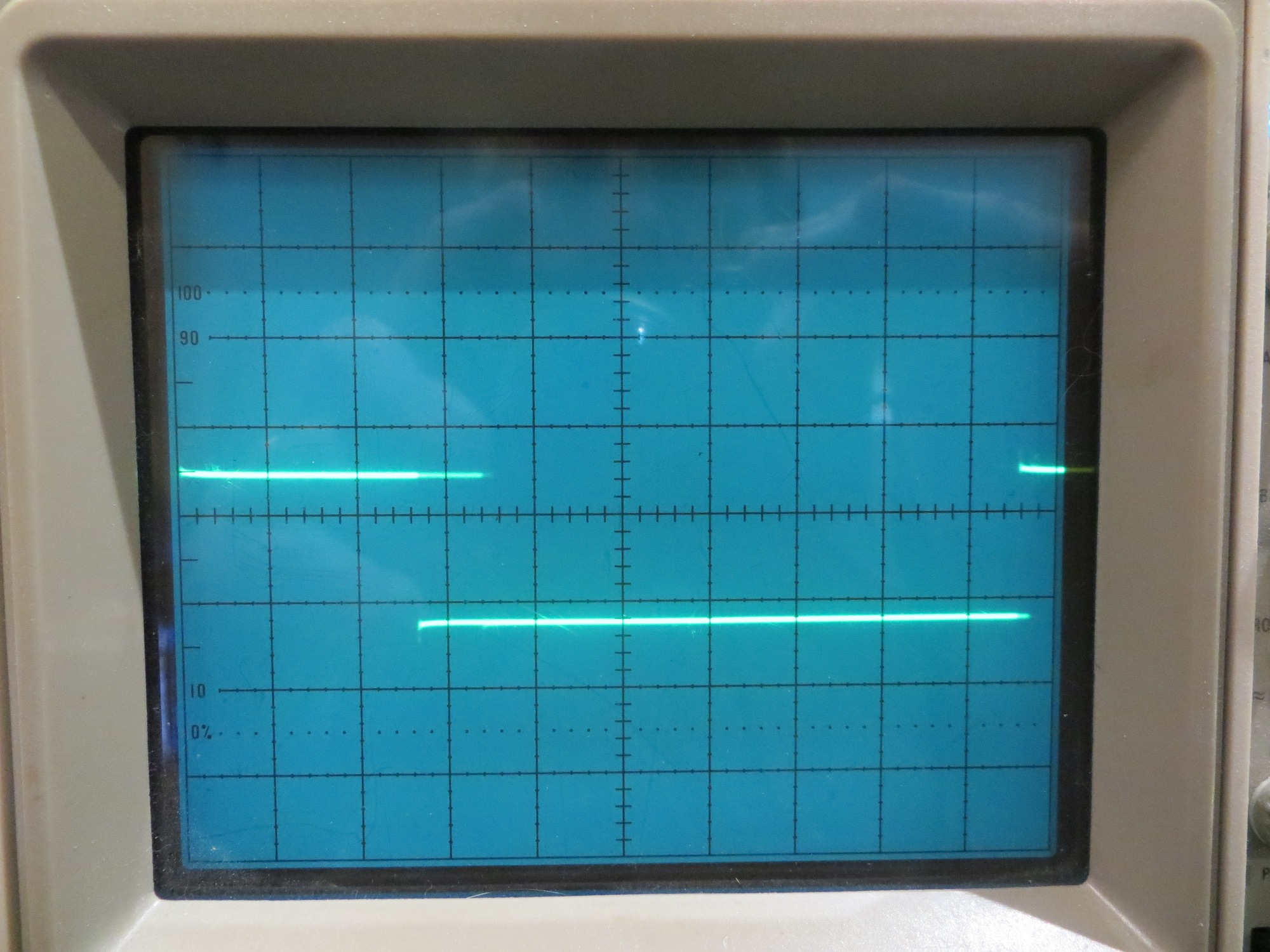
Timing pulse for BPF algorithm run, shown at 10uS/cm. Note the time between rising edges is almost exactly 96uSec, and there is well over 60uSec ‘free time’ between the end of processing and the start of the next acquisition window.
As can be seen in the above photo, there appears to be plenty of time (over 60μSec) remaining between the end of processing for one acquisition cycle, and the start of the next acquisition window. Also, note the fainter ‘fill-in’ section over the LOW part of the digital output. I believe this shows that not all acquisition cycles take the same amount of processing time. Four acquisition cycles out of every 5 require much less processing, as all that happens is the individual samples are grouped into a ‘sample_group’. So the faint ‘fill-in’ section probably shows the additional time required for the processing that occurs after collection/summation of each ‘sample_group’.
The code for these measurements is included below:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 |
//Program to implement John Jenkins I/Q sq wave demod scheme //see his sync_filter_2c.xlsx document //Purpose (v3): // Produce a running estimate of the magnitude of a square-wave modulated IR // signal in the presence of ambient interferers. The estimate is computed by // adding the absolute values of the running sums of the I & Q outputs from a // digital bandpass filter centered at the square-wave frequency (nominally 520Hz). // The filter is composed of two N-element circular buffers, one for the // I 'channel' and one for the Q 'channel'. Each element in each circular buffer // represents one full-cycle sum of the I or Q 'channels' of the sampler. Each // full-cycle sum is composed of four 1/4 cycle groups of samples (nominally 5 // samples/group), where each group is first summed and then multiplied by the // appropriate sign to form the I and Q 'channels'. The output is updated once // per input cycle, i.e. approximately once every 2000 uSec. The size of the // nominally 64 cycle circular determines the bandwidth of the filter. //Plan: // Step1: Collect a 1/4 cycle group of samples and sum them into a single value // Step2: Assign the appropriate multiplier to form I & Q channel values, and // add the result to the current cycle sum I & Q variables respectively // Step3: After 4 such groups have been collected and processed into full-cycle // I & Q sums, add them to their respective N-cycle running totals // Step4: Subtract the oldest cycle sums from their respective N-cycle totals, and // then overwrite these values with the new ones // Step5: Compute the final demodulate sensor value by summing the absolute values // of the I & Q running sums. // Step6: Update buffer indicies so that they point to the new 'oldest value' for // the next cycle //Notes: // step 1 is done each acquisition period // step 2 is done each SAMPLES_PER_GROUP acquisition periods // step 3-6 are done each SAMPLES_PER_CYCLE acquisition periods #include <ADC.h> ADC *adc = new ADC(); // adc object; #pragma region ProgConsts const int OUTPUT_PIN = 32; //lower left pin const int IRDET1_PIN = A0; //aka pin 14 //const int SQWAVE_FREQ_HZ = 520; //approximate //const int USEC_PER_SAMPLE = 1E6 / (SQWAVE_FREQ_HZ * SAMPLES_PER_CYCLE); const int SAMPLES_PER_CYCLE = 20; const int GROUPS_PER_CYCLE = 4; const int SAMPLES_PER_GROUP = SAMPLES_PER_CYCLE / GROUPS_PER_CYCLE; const float USEC_PER_SAMPLE = 95.7; //value that most nearly zeroes beat-note const int RUNNING_SUM_LENGTH = 64; const int NUMSENSORS = 4; const int aSensorPins[NUMSENSORS] = { A0, A1, A2, A3 }; const int aMultVal_I[GROUPS_PER_CYCLE] = { 1, 1, -1, -1 }; const int aMultVal_Q[GROUPS_PER_CYCLE] = { -1, 1, 1, -1 }; #pragma endregion Program Constants #pragma region ProgVars int aSampleSum[NUMSENSORS];//sample sum for each channel int aCycleGroupSum_Q[NUMSENSORS];//cycle sum for each channel, Q component int aCycleGroupSum_I[NUMSENSORS];//cycle sum for each channel, I component int aCycleSum_Q[NUMSENSORS][RUNNING_SUM_LENGTH];//running cycle sums for each channel, Q component int aCycleSum_I[NUMSENSORS][RUNNING_SUM_LENGTH];//running cycle sums for each channel, I component int RunningSumInsertionIndex = 0; int aRunningSum_Q[NUMSENSORS];//overall running sum for each channel, Q component int aRunningSum_I[NUMSENSORS];//overall running sum for each channel, I component int aFinalVal[NUMSENSORS];//final value = abs(I)+abs(Q) for each channel #pragma endregion Program Variables elapsedMicros sinceLastOutput; int SampleSumCount; //sample sums taken so far. range is 0-4 int CycleGroupSumCount; //cycle group sums taken so far. range is 0-3 void setup() { Serial.begin(115200); pinMode(OUTPUT_PIN, OUTPUT); pinMode(IRDET1_PIN, INPUT); digitalWrite(OUTPUT_PIN, LOW); //decreases conversion time from ~15 to ~5uSec adc->setConversionSpeed(ADC_CONVERSION_SPEED::HIGH_SPEED); adc->setSamplingSpeed(ADC_SAMPLING_SPEED::HIGH_SPEED); adc->setResolution(12); adc->setAveraging(1); } void loop() { //this runs every 95.7uSec if (sinceLastOutput > 95.7)// stopped { sinceLastOutput = 0; //start of timing pulse digitalWrite(OUTPUT_PIN, HIGH); // Step1: Collect a 1/4 cycle group of samples for each channel and sum them into a single value // this section executes each USEC_PER_SAMPLE period Serial.print("SampleSumCount = "); Serial.println(SampleSumCount); for (int i = 0; i < NUMSENSORS; i++) { aSampleSum[i] += adc->analogRead(aSensorPins[i]); } SampleSumCount++; //goes from 0 to SAMPLES_PER_GROUP-1 // Step2: Every 5th acquisition cycle, assign the appropriate multiplier to form I & Q channel values, and // add the result to the current cycle sum I & Q variables respectively if(SampleSumCount == SAMPLES_PER_GROUP) //an entire sample group sum is ready for further processing { SampleSumCount = 0; //starts a new sample group Serial.print("CycleGroupSumCount = "); Serial.println(CycleGroupSumCount); for (int j = 0; j < NUMSENSORS; j++) { aCycleGroupSum_I[j] += aSampleSum[j] * aMultVal_I[j]; //add new I comp to cycle sum aCycleGroupSum_Q[j] += aSampleSum[j] * aMultVal_Q[j]; //add new Q comp to cycle sum } CycleGroupSumCount++; }//if(SampleSumCount == SAMPLES_PER_GROUP) // Step3: After 4 such groups have been collected and processed into full-cycle // I & Q sums, add them to their respective N-cycle running totals if(CycleGroupSumCount == GROUPS_PER_CYCLE) //now have a complete cycle sum for I & Q - load into running sum circ buff { CycleGroupSumCount = 0; //start a new cycle group next time Serial.print("RunningSumInsertionIndex = "); Serial.println(RunningSumInsertionIndex); for (int k = 0; k < NUMSENSORS; k++) { // Step4: Subtract the oldest cycle sums from their respective N-cycle totals, and // then overwrite these values with the new ones int oldestvalue_I = aCycleSum_I[k][RunningSumInsertionIndex]; int oldestvalue_Q = aCycleSum_Q[k][RunningSumInsertionIndex]; aRunningSum_I[k] = aRunningSum_I[k] + aCycleGroupSum_I[k] - oldestvalue_I; aRunningSum_Q[k] = aRunningSum_Q[k] + aCycleGroupSum_Q[k] - oldestvalue_Q; aCycleSum_I[k][RunningSumInsertionIndex] = aCycleGroupSum_I[k]; aCycleSum_Q[k][RunningSumInsertionIndex] = aCycleGroupSum_Q[k]; // Step5: Compute the final demodulate sensor value by summing the absolute values // of the I & Q running sums int RS_I = aRunningSum_I[k]; int RS_Q = aRunningSum_Q[k]; aFinalVal[k] = abs((int)RS_I) + abs((int)RS_Q); } // Step6: Update buffer indicies so that they point to the new 'oldest value' for // the next cycle RunningSumInsertionIndex++; if (RunningSumInsertionIndex >= RUNNING_SUM_LENGTH) RunningSumInsertionIndex = 0; } //end of timing pulse digitalWrite(OUTPUT_PIN, LOW); }//else }//loop |
More to come,
Frank