Posted 04 April 2021
Lately I have been working on improving the performance of Wall-E2, my autonomous wall-following robot, when homing in and connecting to it’s charging station. The robot uses the PID (Proportional-Integral-Derivative) library to drive the motors to home in on an IR beacon, and this ‘mostly’ works, but still occasionally hangs up on the lead-in rails. I have made several attempts to get this right (see this post and earlier work), but have never really gotten it zeroed in. After yet another web search for tuning help, I ran across this post dealing with the Ziegler-Nichols method for PID tuning. Basically the method starts by setting the proportional (Kp), integral (Ki) and derivative (Kd) terms to zero, and then slowly increasing the proportional (Kp) term until a ‘stable oscillation condition’ is achieved (Kp = Kc). Then the Ki & Kd terms can be calculated using the following relationships:
Getting to the ‘Kc’ (Kp-critical) value for my setup is a bit more difficult than normal, as the PID engine only operates for a few seconds, from the time the IR homing beacon is detected, to the time the robot actually connects (or doesn’t) to the charging probe. Here’s a short video showing a typical run (Kd = 150 in this case), and an Excel plot of the steering value from the same run.
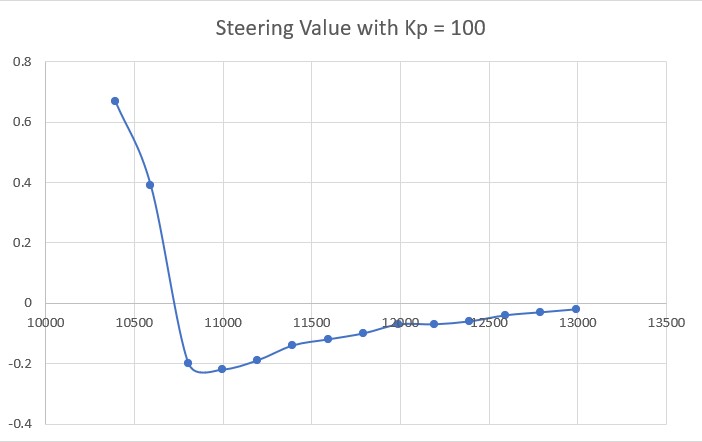
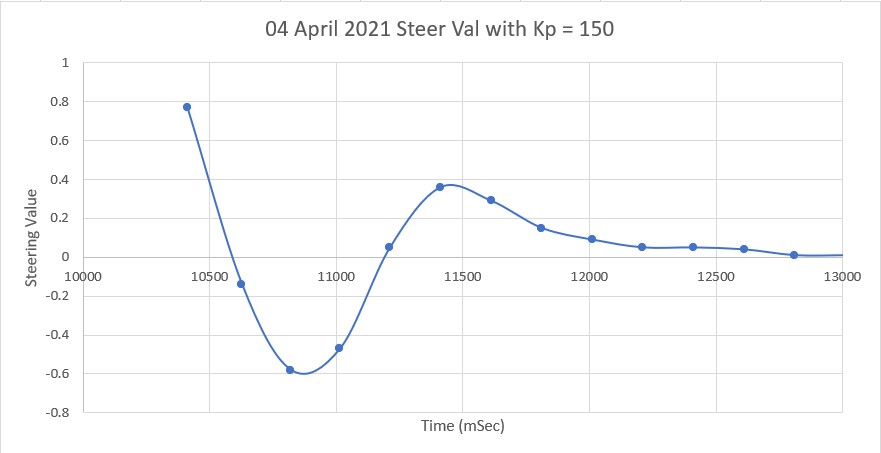
As can be seen from the above, there really isn’t much of an ‘oscillation’ to go on – there is basically only one full cycle from about 10.5 sec to around 12.0 sec.
Here’s another run, this time with Kd set to 200. As can be seen, this is much more like what I was expecting to see, with several full cycles of oscillation. The amplitude trails off a bit toward the end, but this may have been due to a low battery level – I’ll have to repeat this experiment after getting a full charge into the robot.
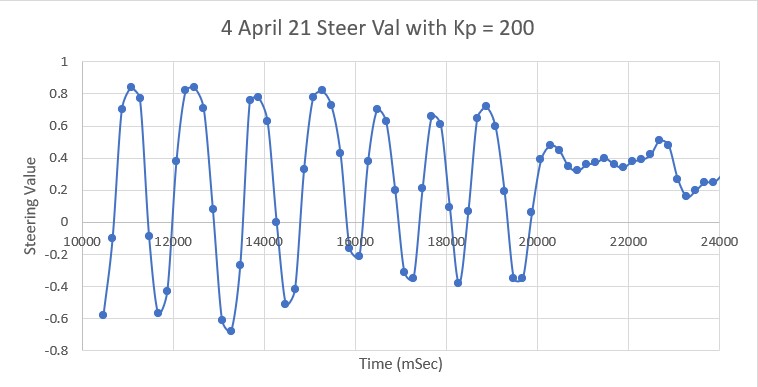
However, using the above data with Kc = 200, we get
|
1 2 3 |
Kp = 0.5Kc = 100 Ki = 0.45Kc = 90 Kd = 0.6Kc = 120 |
I revised my program to incorporate the Z-N numbers from the above calculations, and this resulted in the homing runs shown below; in the first one, Wall-E2 was oriented directly at the charging station beacon, and the robot’s track was pretty much direct, with no side-side oscillation at all. In the second one I oriented the robot a bit off-axis to excite a more active homing response. In both runs, the LEDs on the rear of the robot show the current relative wheel speed commands – LED’s to the left of center indicate higher wheel speed on the left, and vice versa. In the first run, the LEDs show that there is some oscillation of wheel speed commands, but it is relatively small, leading to an almost serene homing performance. In the second run the initial orientation offset forces the robot to more actively manage the wheel speeds to stay ‘on the beam’.
Stay tuned,
Frank