Posted 05 April 2021
Wall-E2, my autonomous wall-following robot, does a lot of turns to follow walls. Originally Wall-E2 used a simple timing algorithm to make turns, but this wasn’t very accurate. On a hard surface a 5-second turn at half motor speed could result in a 360º turn, while the same 5 seconds on carpet my only cover 90º. After installing the MPU6050 IMU about 18 months ago, turns could be controlled much more accurately, but the turn rate still varied widely on carpet vs hard flooring. Some time ago, I revised Wall-E2’s program to use a PID engine for turn rate control, but this resulted in a low-frequency ‘motorboating’ movement as the robot ramped up motor current until the angle started changing, followed by ramping the motor current down again because the turn rate target had been exceeded.
After having some success with improving the robot’s performance in homing to the charging station by utilizing the Zeigler-Nichols tuning method, I decided to try using it to improve turn rate control.
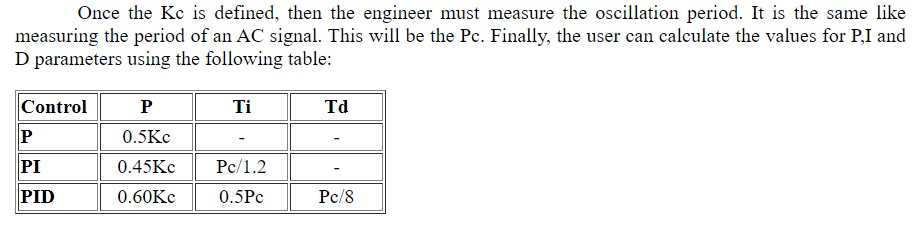
The method starts with setting the PID variables to (Kp, 0, 0) and then varying the Kp values to determine Kc, the value at which the setpoint variable (in this case, the turn rate in deg/sec) exhibits a steady oscillation. The value of Kc is then used to calculate all three PID parameters using
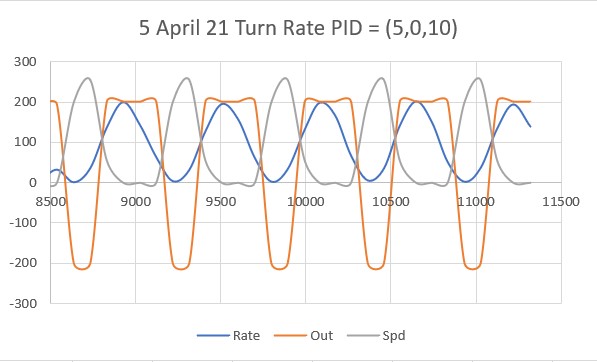
The existing setting for Kp, Ki, and Kd was Kp = 5, Ki = 0, Kd = 10, and this resulted in the following plot for a single 270º turn.
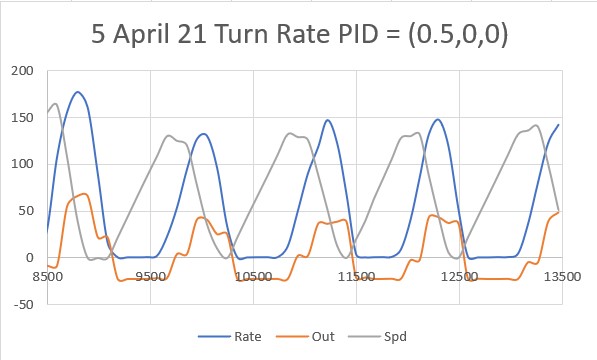
To start the process of determining Kc, I first zeroed out the Kd factor, resulting in the following plot:
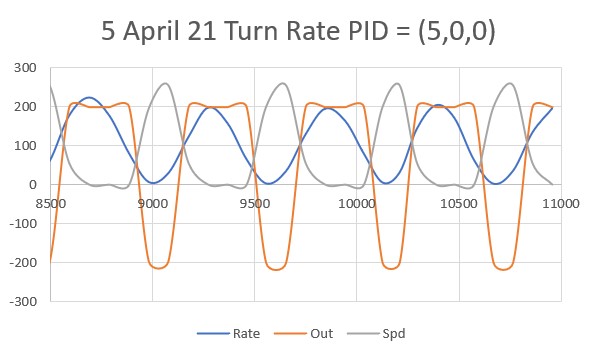
So the system is clearly exhibiting a ‘constant amplitude oscillation’, but Kc is the minimum Kp value that produces oscillation. So, I started reducing Kp looking for the point at which the oscillation stopped, producing the following plots:
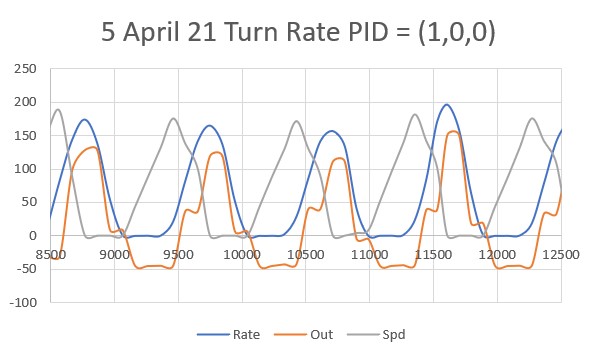
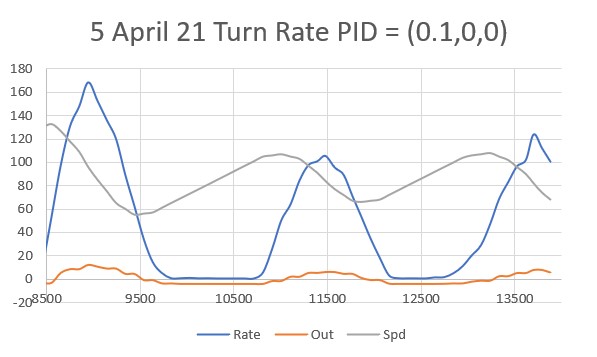
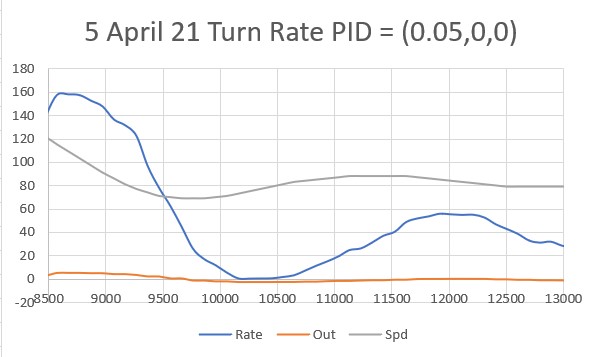
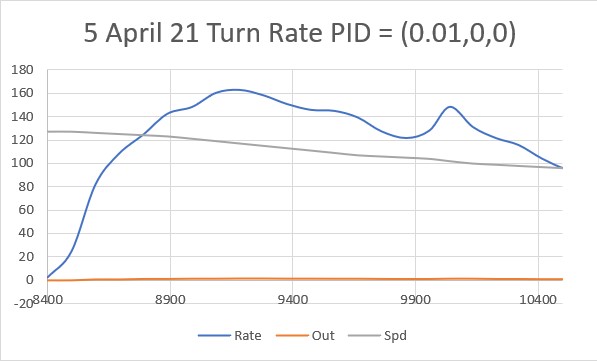
Comparing the above plots, it seems the value of Kc is probably around 0.1. Using the Z-N formula above, I get
|
1 2 3 |
Kp = 0.5Kc = 0.05 Ki = 0.45Kc = 0.045 Kd = 0.6Kc = 0.06 |
These values are almost two orders of magnitude smaller than the values I had been using – ouch! Looking back on the original work, I had declared the Kp, Ki, & Kd variables as ‘const int’, which means the lowest positive value I could use was ‘1’, which might explain why I never tried anything smaller. Of course, I could have also done what I did with the home-to-charger PID engine and arranged the turn rate calculation so that instead of Kc = 0.1, it would have been more like 100, resulting in (Kp,Ki,Kd) values of (50,45,60).
Anyway, using values of (0.05, 0.045, 0.06) results in the following plot
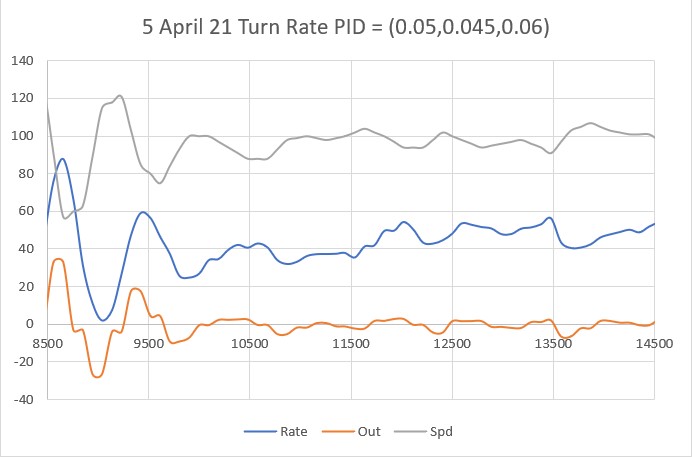
And here is a short video showing the robot executing the 270º turn plotted above
I was quite impressed by the difference between what I had before and the current performance after implementing the Z-N tuning method; the turn rate was an almost constant 40º/sec (an average of 42.9º according to Excel). And, now that I have a semi-constant rate to look at, it appears to me that I should probably crank up the turn rate to something more like 90º/sec.
With the turn rate cranked up to 90º/sec and using the same values for Kp, Ki, Kd, I get the following plot and video.
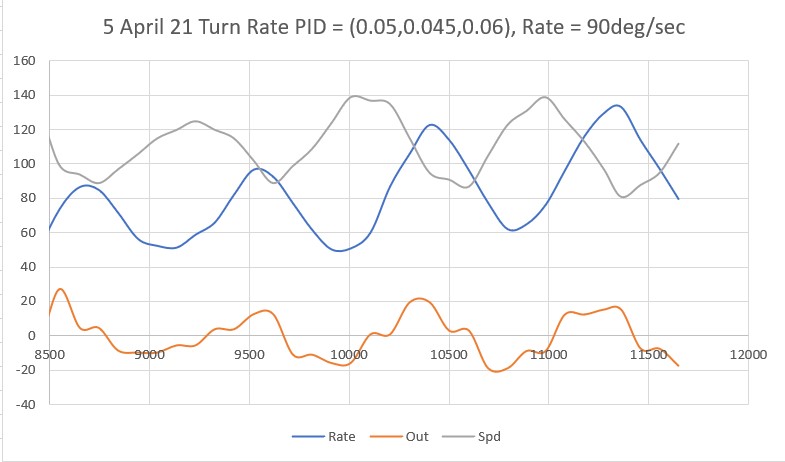
The plot of turn rate vs time shows considerably more variation with a 90º/sec turn rate, as compared to 45º/sec; maybe Kc is different due to the different physical dynamics of the robot? The average turn rate from the Excel data is 80º/sec; not the 90º/sec I was looking for, but still not bad. Even so, this result is much better than I had before, with extreme motorboating between 0º/sec and something much higher. I may or may not try to re-determine Kc, but in the meantime I think I’ll run with this for a while.
10 April 2021 Update:
Some of the above data were collected at a pretty low charge level. When I had the opportunity to recharge Wall-E2 I re-took the 90º/sec run with the following results:
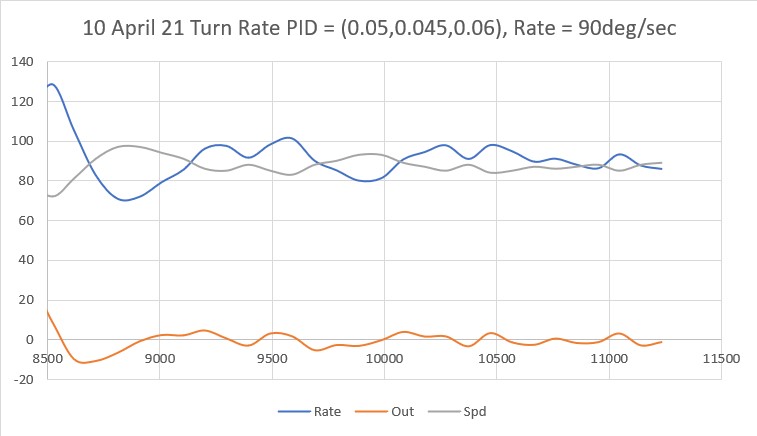
As the above plot shows, the turn rate was held almost constant (average of 87.9º) throughout the turn – very nice!
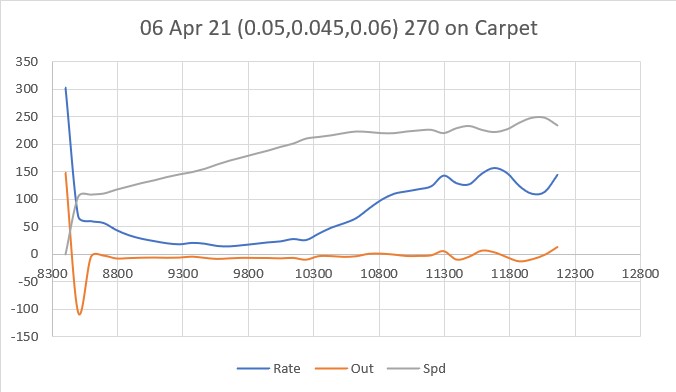
Here’s another run, this time on carpet with a fully charged battery. As expected, the robot has a harder time getting started on carpet due to the added sideways friction on the wheels. However, once the turn gets started, it stabilizes fairly well on the 90º turn rate target
Stay tuned,
Frank