Posted 22 February 2023,
After thoroughly (I hope) investigating the performance of Garmin’s new LIDAR-Lite V4/LED, I’m now in the process of replacing my current Pulsed Light LIDAR with the Garmin unit. Integrating this into the current system is not a simple pull-and-replace operation. The Pulsed Light unit uses a digital control line to trigger a measurement, and the Arduino pulseIn() statement to compute a distance. The Garmin uses I2C, so I’ll need to find a free (or at least one that’s not too busy) I2C port for this purpose. Currently my system architecture looks like this (with I2C ports highlighted):
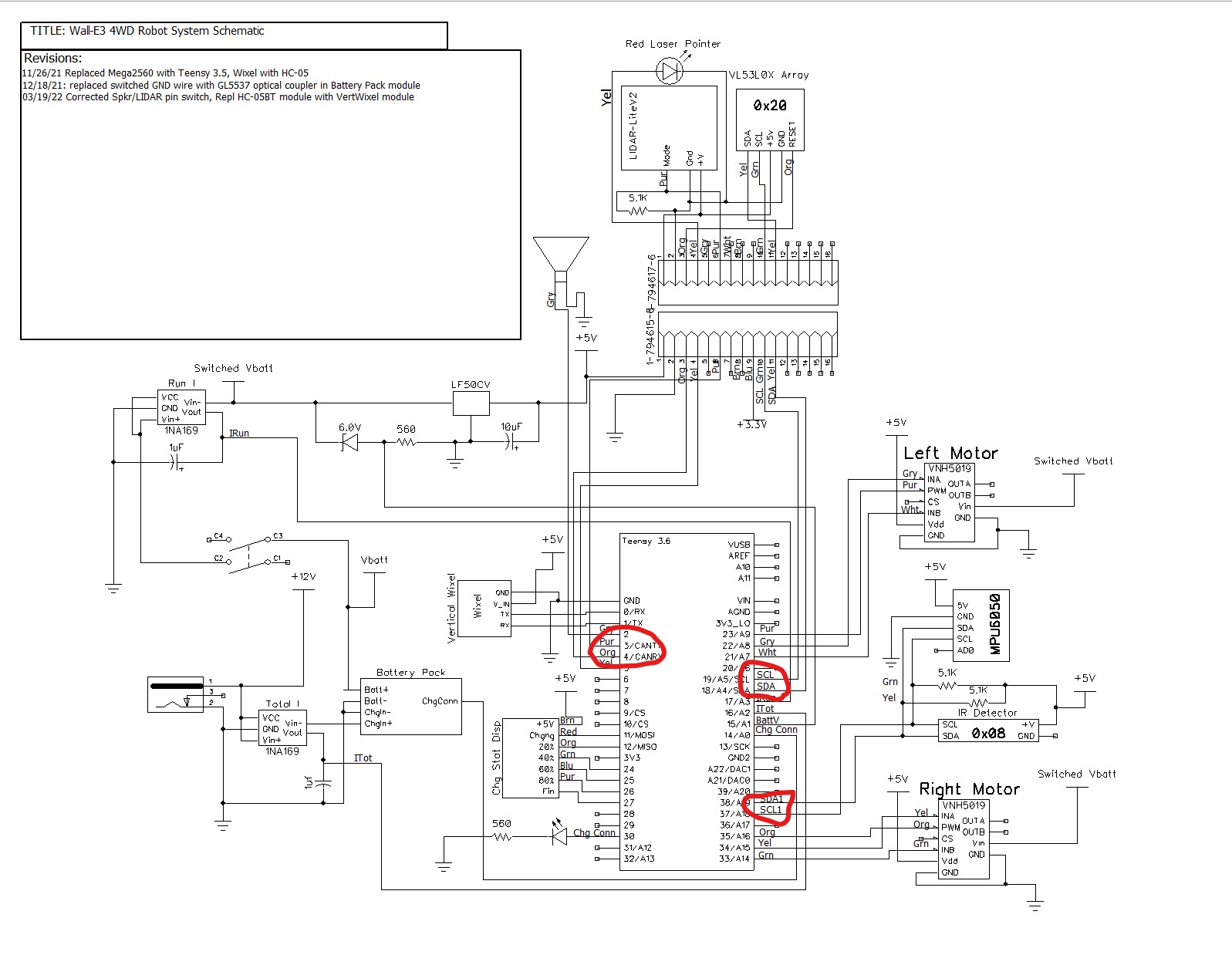
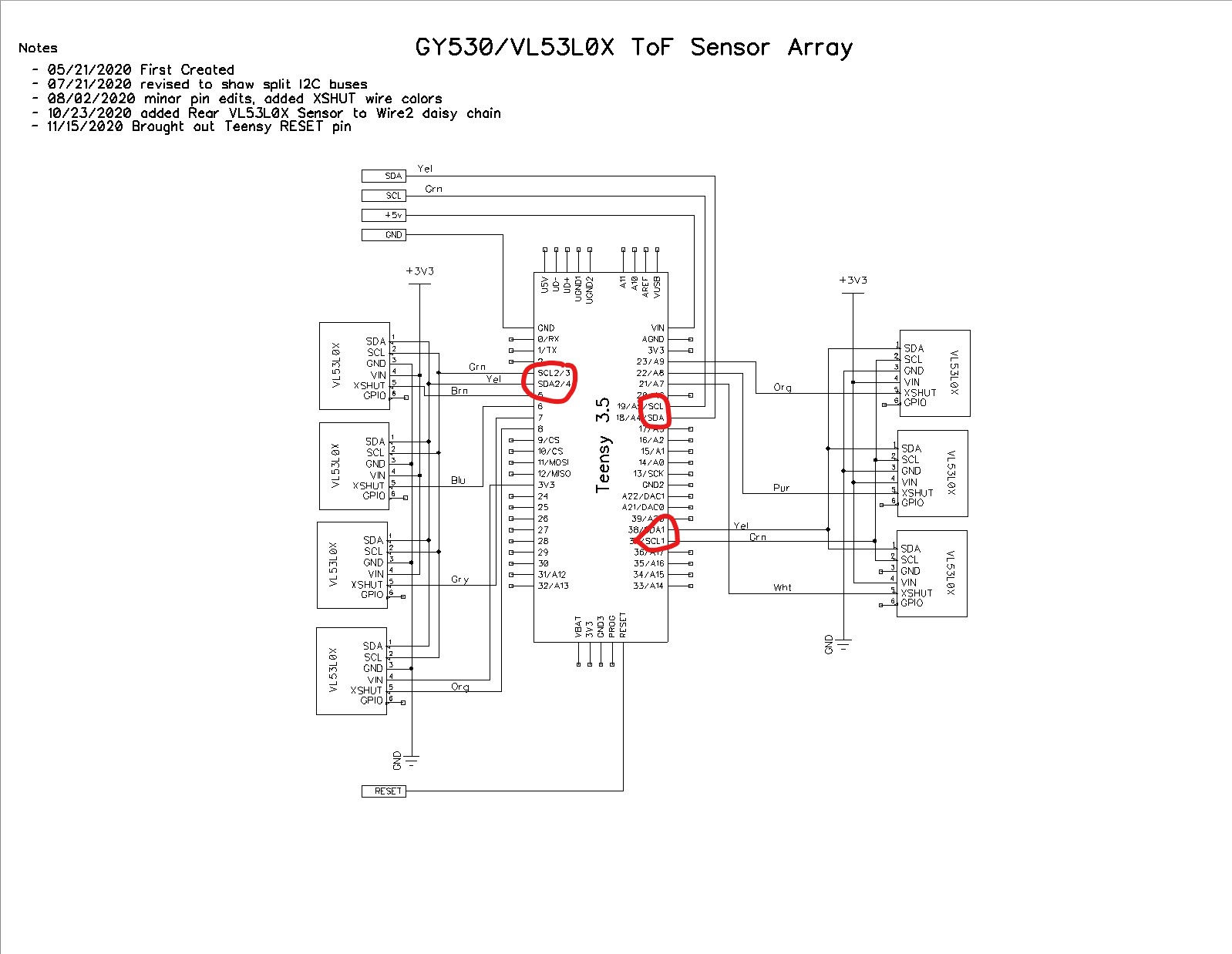
As it stands, all three of the available I2C ports on the VL53L0X Array Teensy are in use, and two of the three are in use on the main system Teensy. However, I2C port 2 (Pins 3 & 4) aren’t being used for I2C, and both lines are already routed to WallE3’s second deck. Even better, one of those lines (pin3/purple) already routes to the Pulsed Light LIDAR, so it would become available when the Pulsed Light unit is removed. The other line (pin4/orange) goes to the VL53L0X Teensy’s ‘Reset’ line, so a replacement for this would have to be found. There are still a number of free pins on the main system Teensy, and there are still a number of free pins available on the inter-deck connector, so this should work. I had thought of replacing the VL53L0X arrays with a single VL53L5CX (see this post for the details), putting both the VL53L5CX’s on a single I2C port, and then using the now-free I2C port for the Garmin LIDAR, but I would much rather keep these two projects separate from each other if I can :).
One minor fly in the ointment is that I don’t want to use the Garmin LIDAR I got from Sparkfun, as this unit came with the ‘Qwiic’ breakout board already attached. While this is a great setup for testing, I don’t need the extra Sparkfun board hanging off the end of the LIDAR unit for the installation on the robot. So, I got a new Garmin without the added board directly from Garmin, and the first step in this project is to make sure this unit actually works.
OK, I can now check the box that says “new Garmin LIDAR-Lite V4/LED unit works in my test setup”. Interestingly though, the undocumented (at least as far as I can tell) feature of the ‘heartbeat’ indicator inside one of the lenses is a bit less visible on this new unit (03/02/23 update – in response to my emailed query, Garmin said that undocumented feature is indeed intended to be a ‘heartbeat’ indicator).
Now the next step will be to remove the Pulsed Light unit from WallE3, install the Garmin unit, and make the wiring changes noted above.
23 February 2023 Update:
After pulling the 2nd deck off the robot and physically inspecting the inter-deck connector wiring, I was able to determine that there were three free lines available to replace (or act as) the VL53L0X Teensy reset line.
02 March 2023 Update:
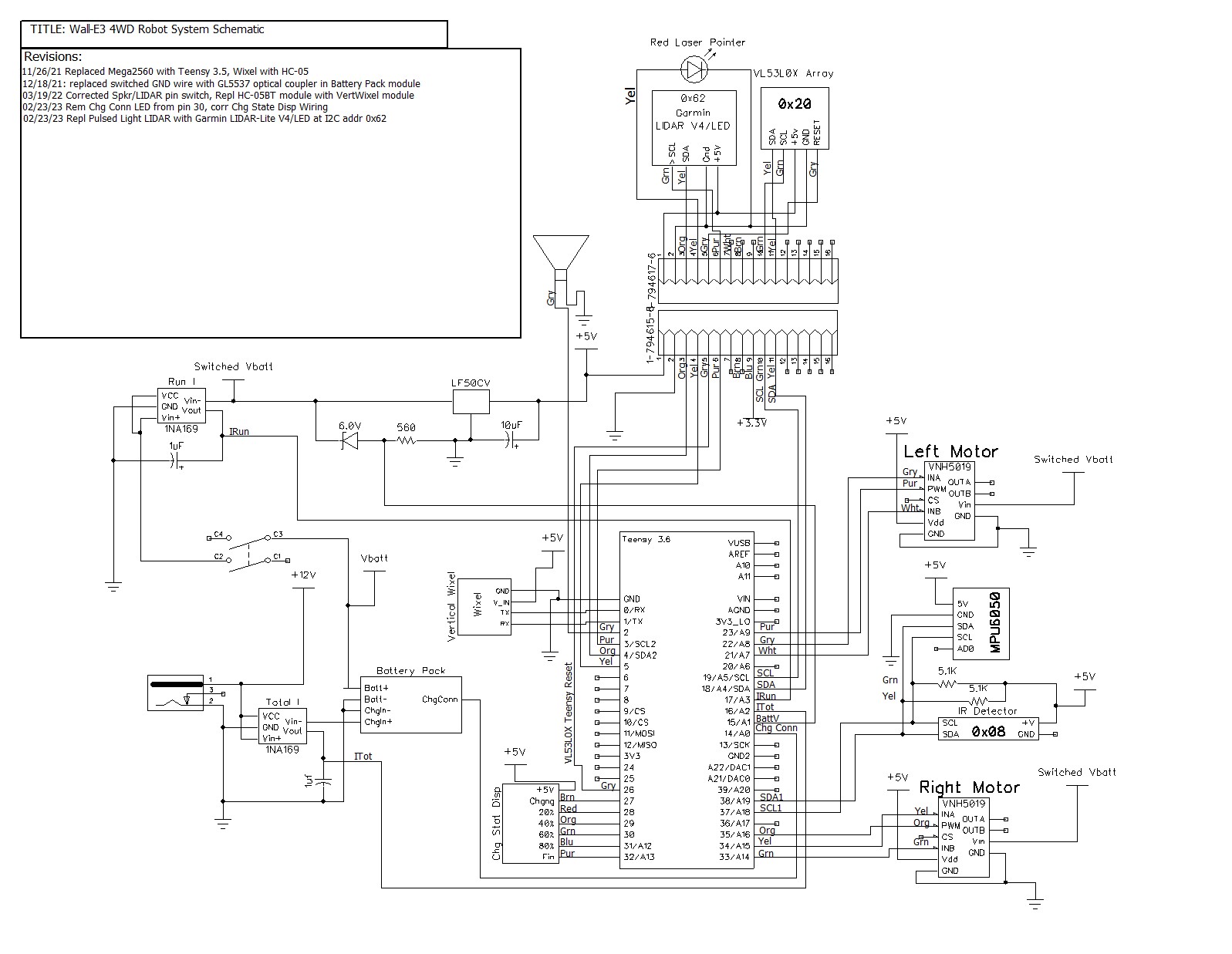
After making the above hardware changes, here is the new system schematic
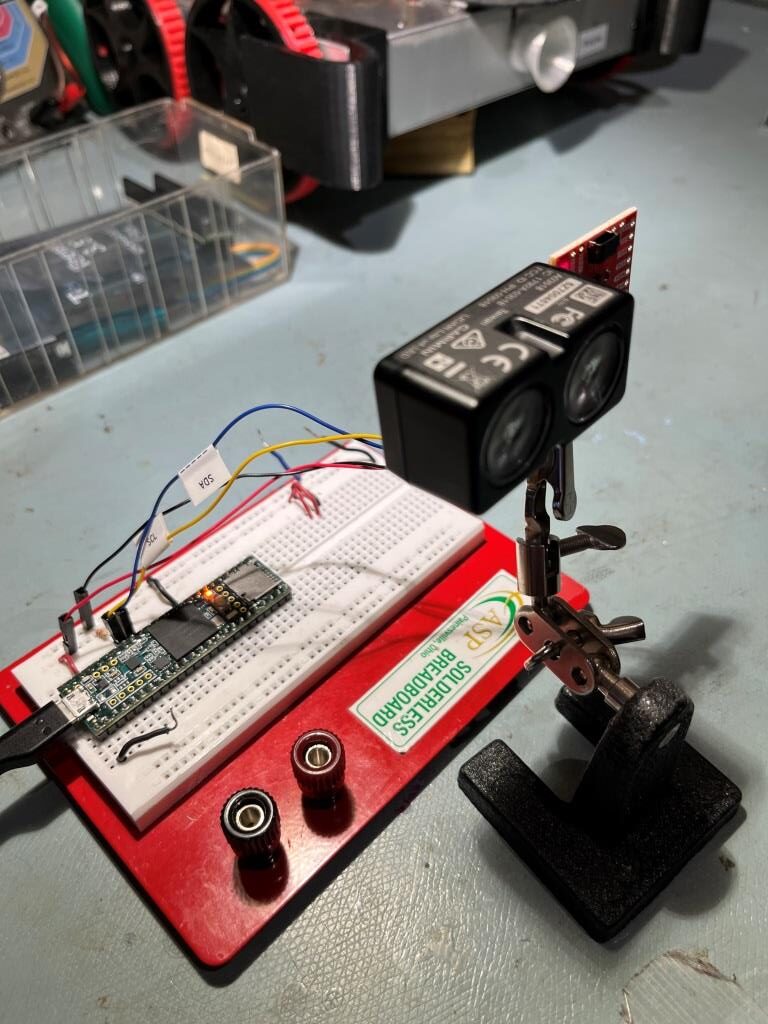
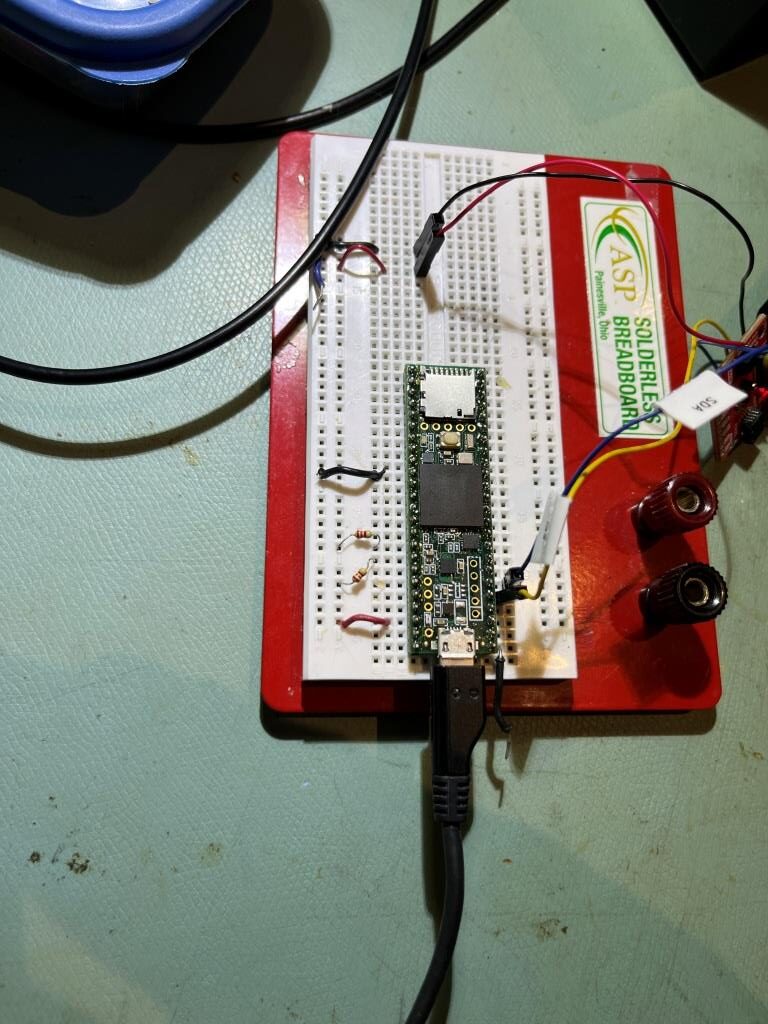
It was at this point that I discovered that the Garmin library for this device doesn’t have support for I2C ports other than ‘Wire’ (Wire0). After dicking around for a while, I looked again at the Sparkfun library and saw that it does have multiport support – yay! So, after dicking around some more, I got the Garmin device working again on I2C port 3 (Wire2) with the Sparkfun library using my little Teensy 3.5 plugboard setup as shown below:
However, somewhere in the change-over from Garmin to Sparkfun libraries, I got all screwed up, and couldn’t make sense of the results. So I decided to ‘go back to baseline’ with the ‘Fast’ example from Garmin. Unfortunately this turned out to be less-than-simple. Both the Garmin and Sparkfun libraries use the same .h/.cpp filenames so having both libraries installed posed a problem, so I ‘solved’ that problem by removing the Garmin libraries from the ‘libraries’ folder. So, when I decided to revert to the Garmin ‘Fast’ example (which references the Garmin library, of course), I got the Sparkfun libraries instead, and so down the rabbit hole I went – again.
I eventually figured all this out, but it took my entire evening to do it. I wound up
- starting an entirely new VS/VM project called ‘Garmin Fast Example’
- copy/pasted the Garmin ‘Fast’ example .ino file into the blank project file
- copied the Garmin library .cpp/.h files into the local project folder, and changed their names to make sure they couldn’t be confused with the Sparkfun versions
- ‘add’ed the .cpp/.h files to the project in Solution Explorer
- Edited the ‘fast’ example #include line to match the .cpp/.h filenames (I had changed them to make sure they wouldn’t conflict with the Sparkfun names)
- made the required edits to the .ino file to get a more informative readout
- Fixed the inevitable screwups.
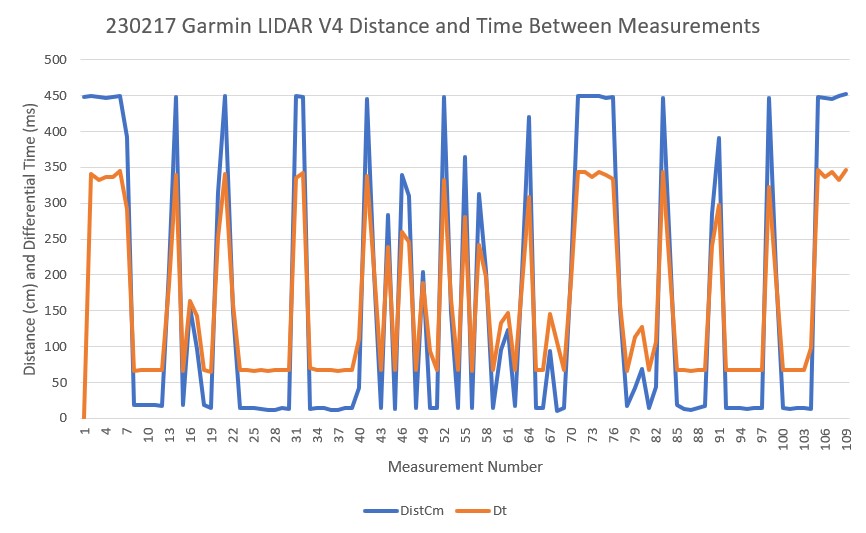
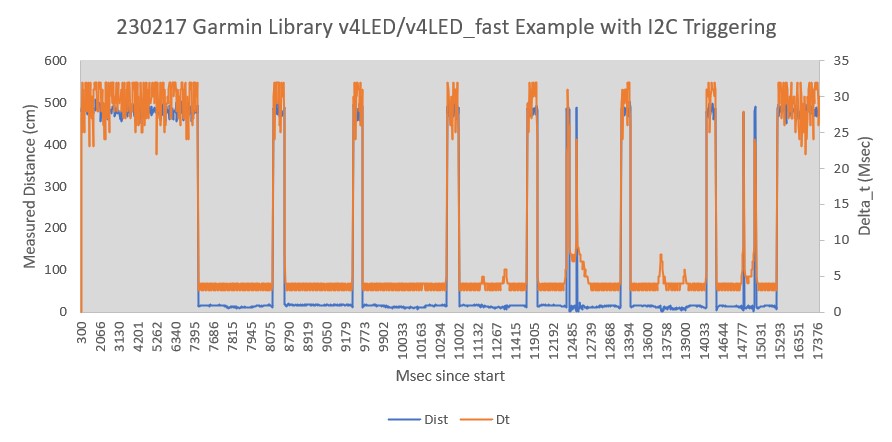
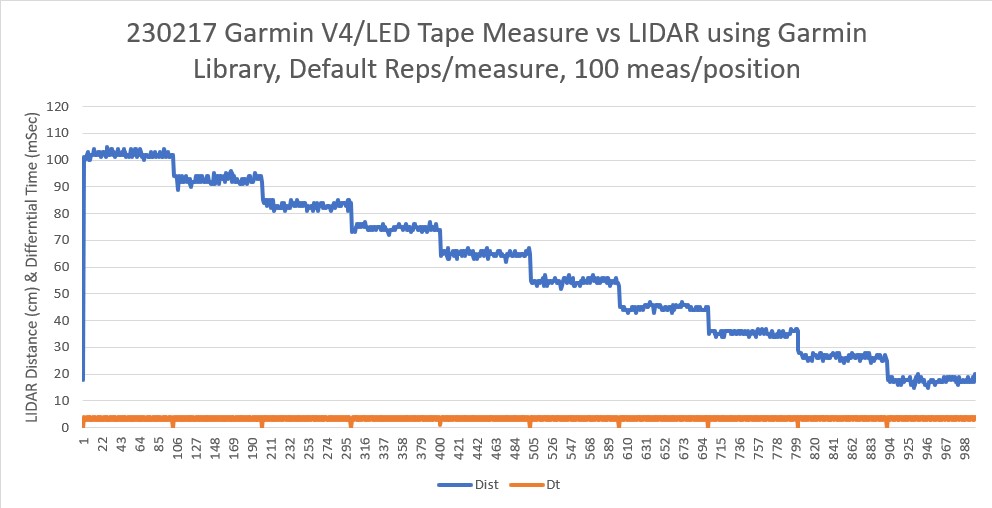
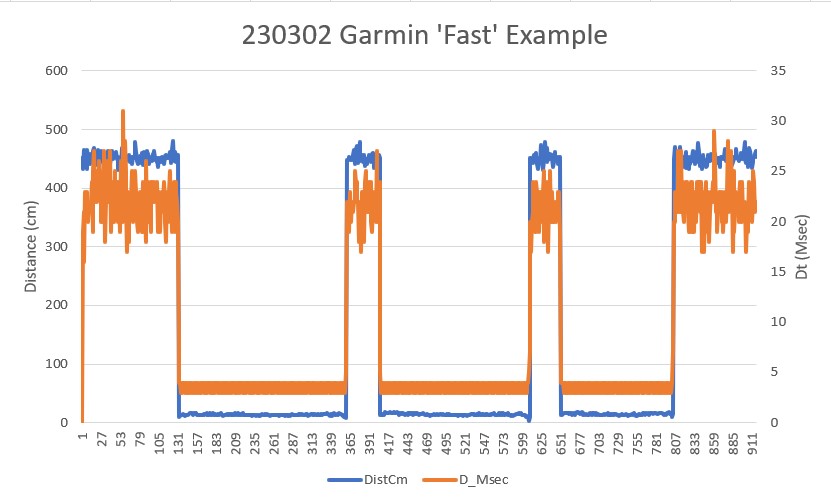
At this point I had a brand-new ‘Fast’ example file, properly instrumented, which produced the following Excel chart:
So, after blowing the entire evening, I’m finally confident that I once again have a working ‘Fast’ example using the Garmin library as a baseline, so now I can continue the adventure by moving to the Sparkfun library so I can move the LIDAR from Wire0 (the default I2C port) to Wire2 where I need it to integrate with WallE3.
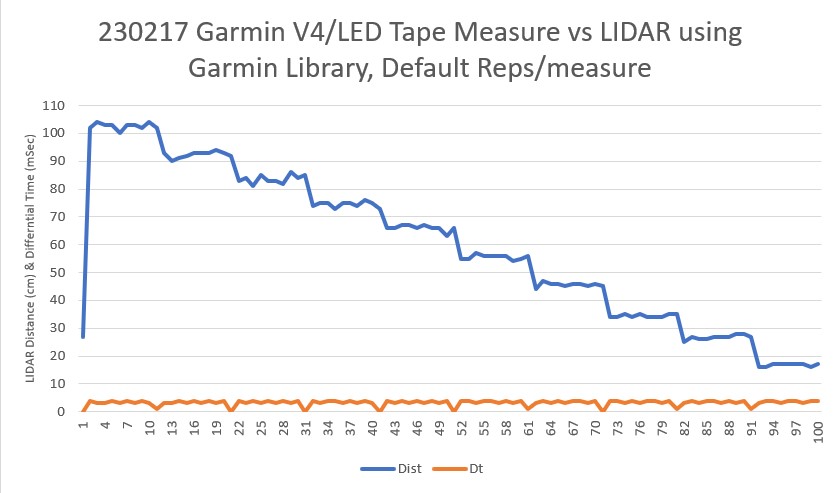
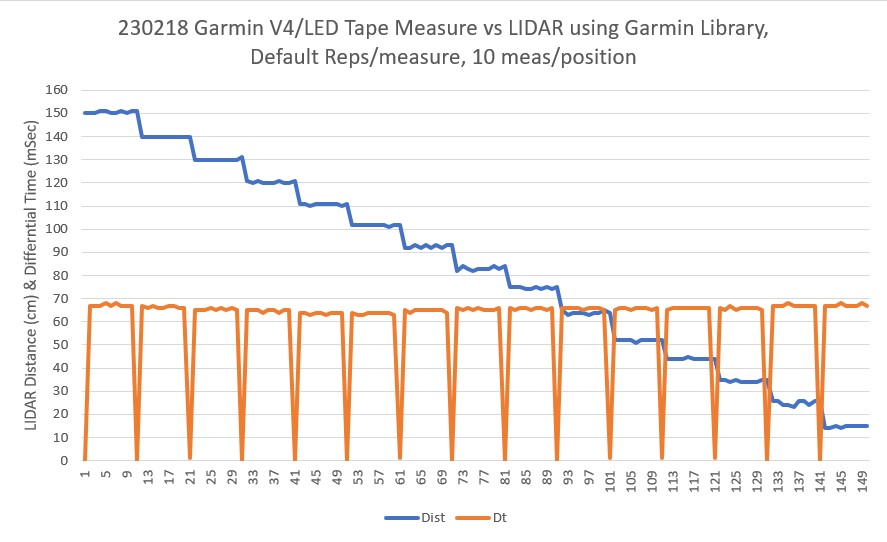
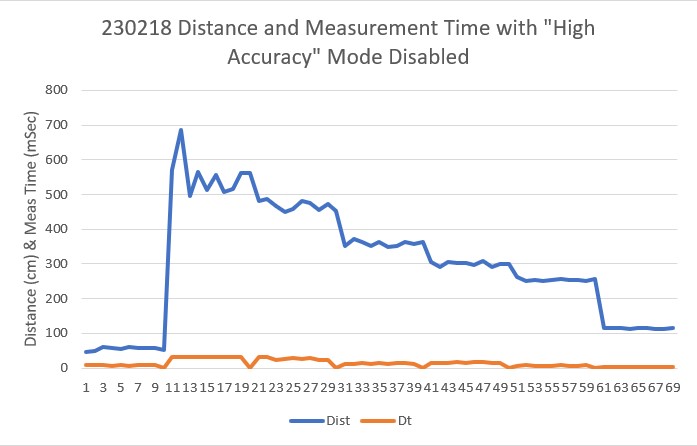
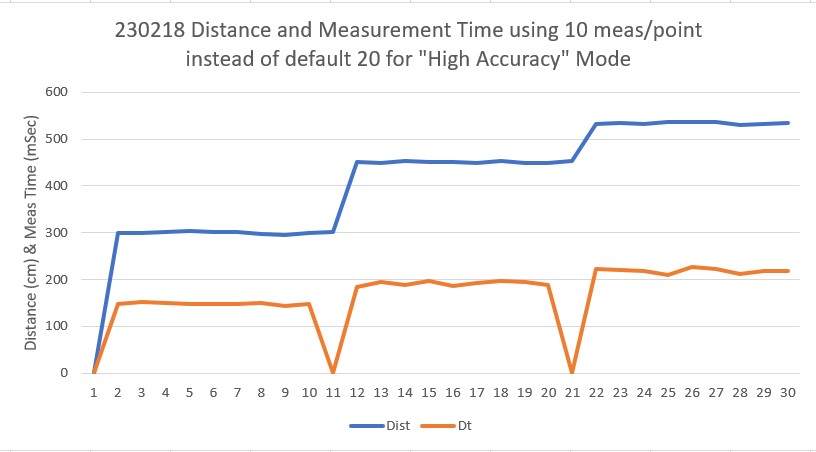
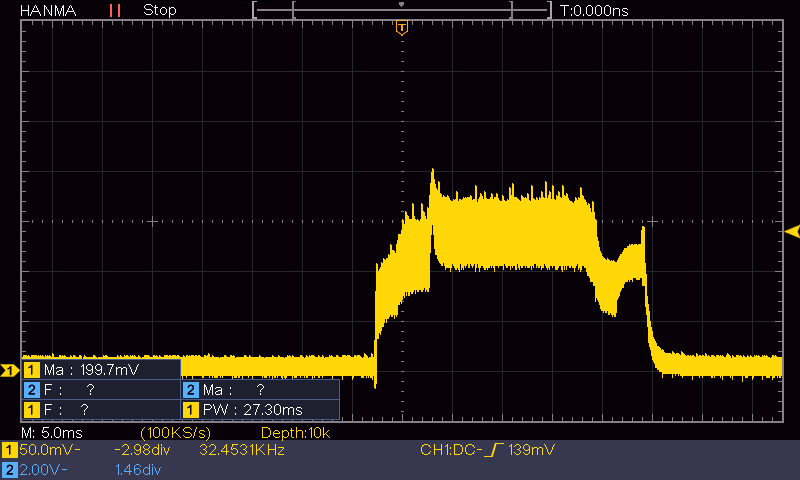
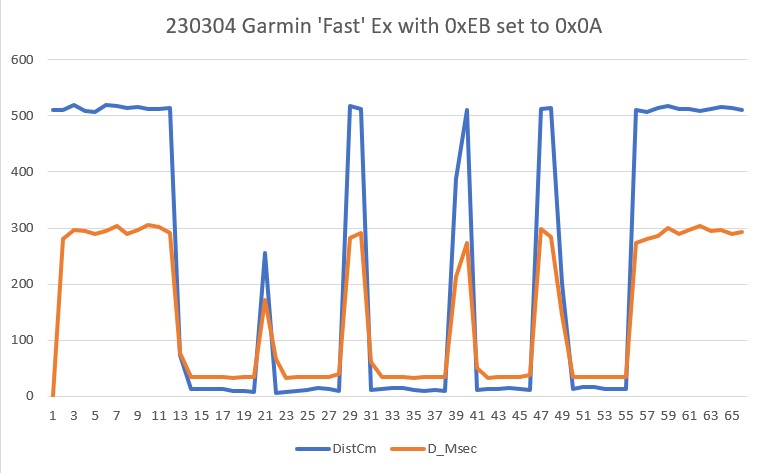
Before switching over to the Sparkfun library, I decided to make a couple more runs for a better understanding of the ‘HIGH ACCURACY’ mode. In the above example ‘0’ is written to the HIGH ACCURACY register (0xEB) to turn it off completely. However, intermediate values from 1 to 20 can also be used. Here’s a run at 0XEB = 10 (0x0A):
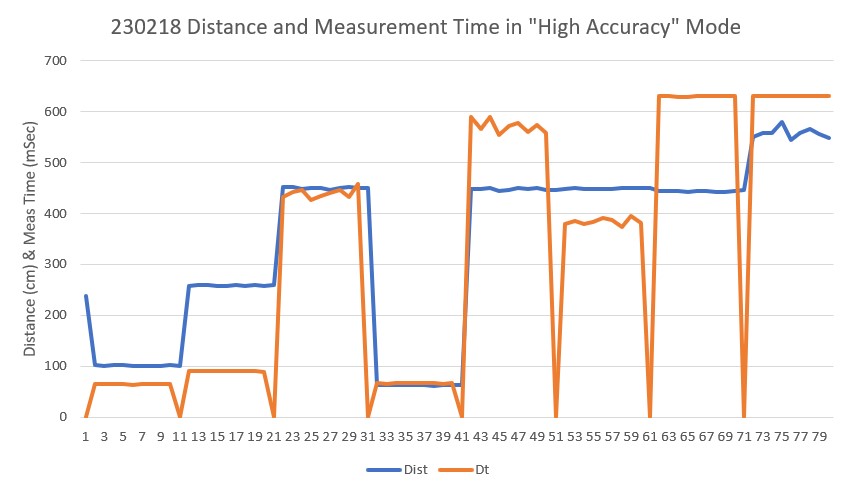
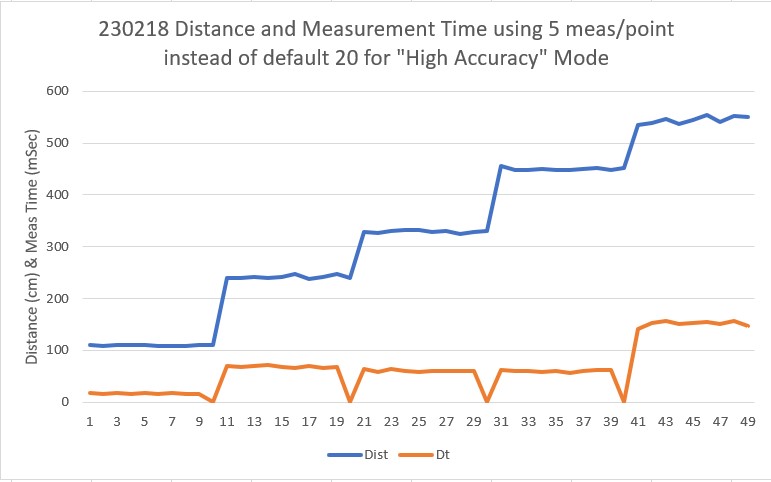
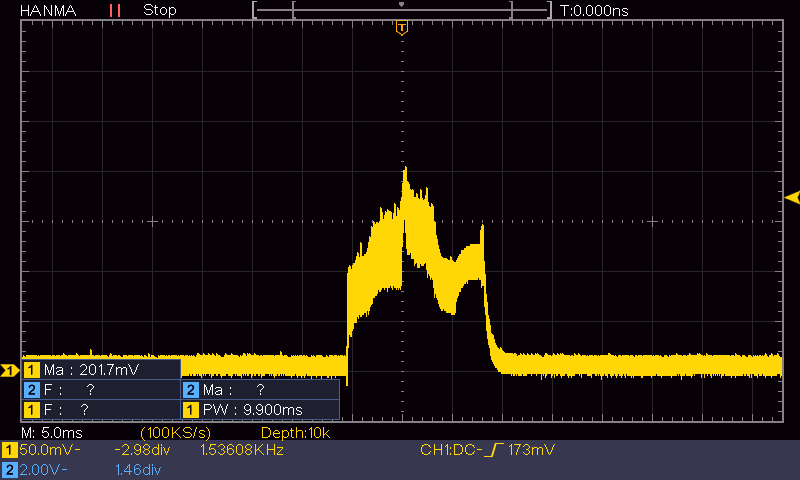
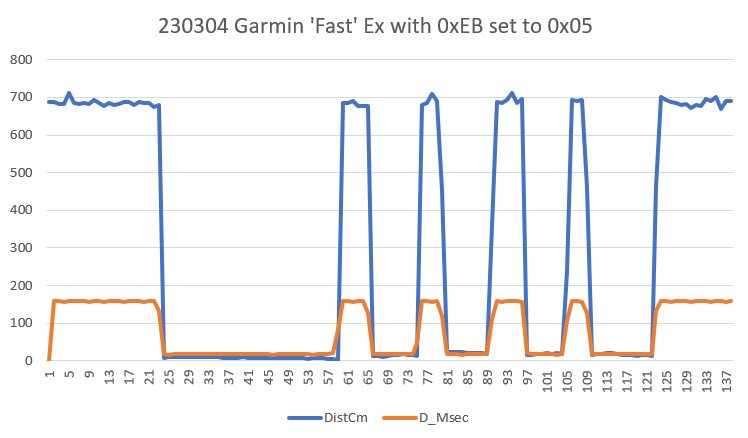
And another run with 0XEB = 0x05:
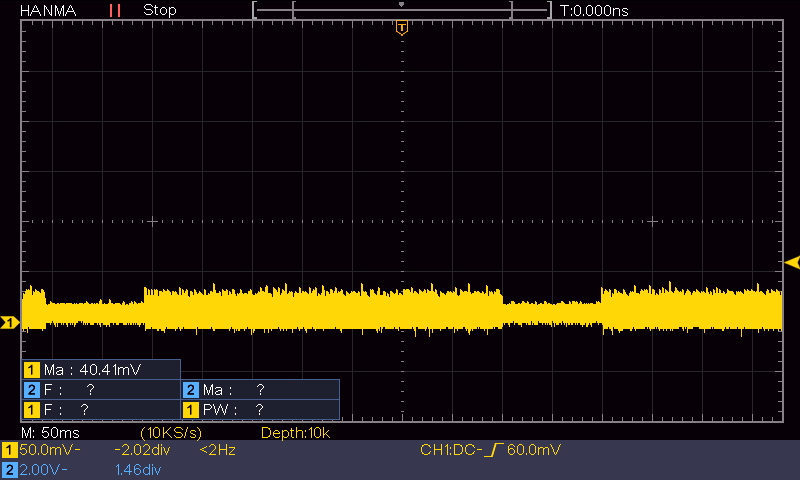
And one more with the register set for 2:
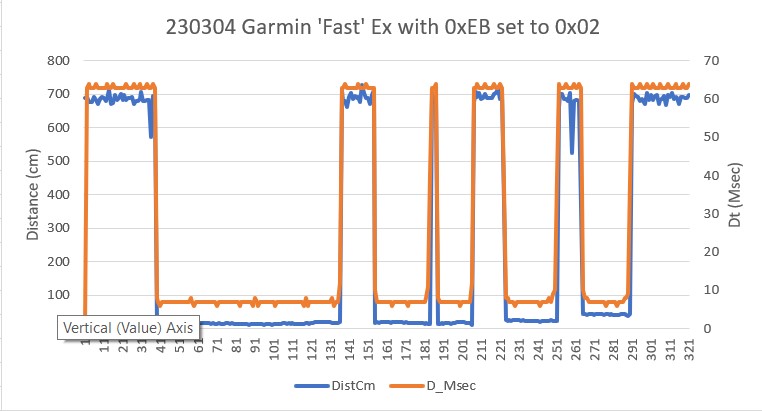
Looking at the above, it seems that a value of ‘5’ should work. This produces a measurement time of about 150-170mSec for a 7m distant target, which is about the most I can reasonably expect to encounter, and this would work fine with a 200mSec front distance cycle time. Or, I could go with a value of ‘2’, suffer a bit less repeatability (not really an issue for the robot) and keep the measurement times well under 100mSec. This would be nice, as then I could use a single measurement interval for all distance measurements.
Next I went back to the Sparkfun version of the library so I could run the Garmin LIDAR-Lite V4/LED unit from Teensy 3.5 Wire2 port (pins 3/4). This program is functionally identical to the Garmin ‘Fast’ example. Here’s the output using 0xEB = 0x02.
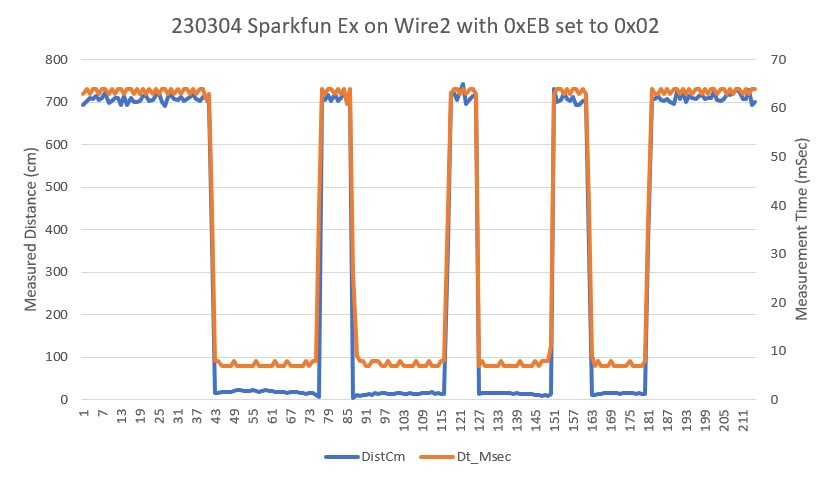
The above plot, taken with the Garmin-supplied LIDAR (without Qwiic breakout) connected to SCL2/SDA2 on WallE3’s main Teensy 3.5 processor is basically identical to the one taken on my separate Teensy 3.5 plugboard with the Sparkfun LIDAR (the one with Qwiic connectors).
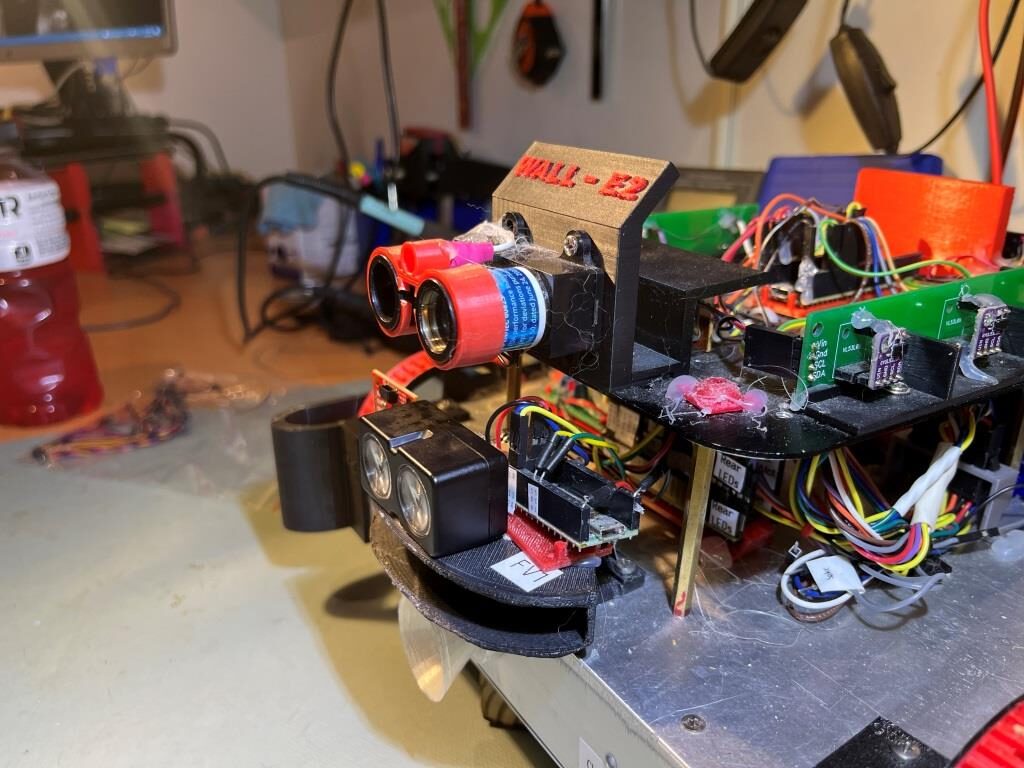
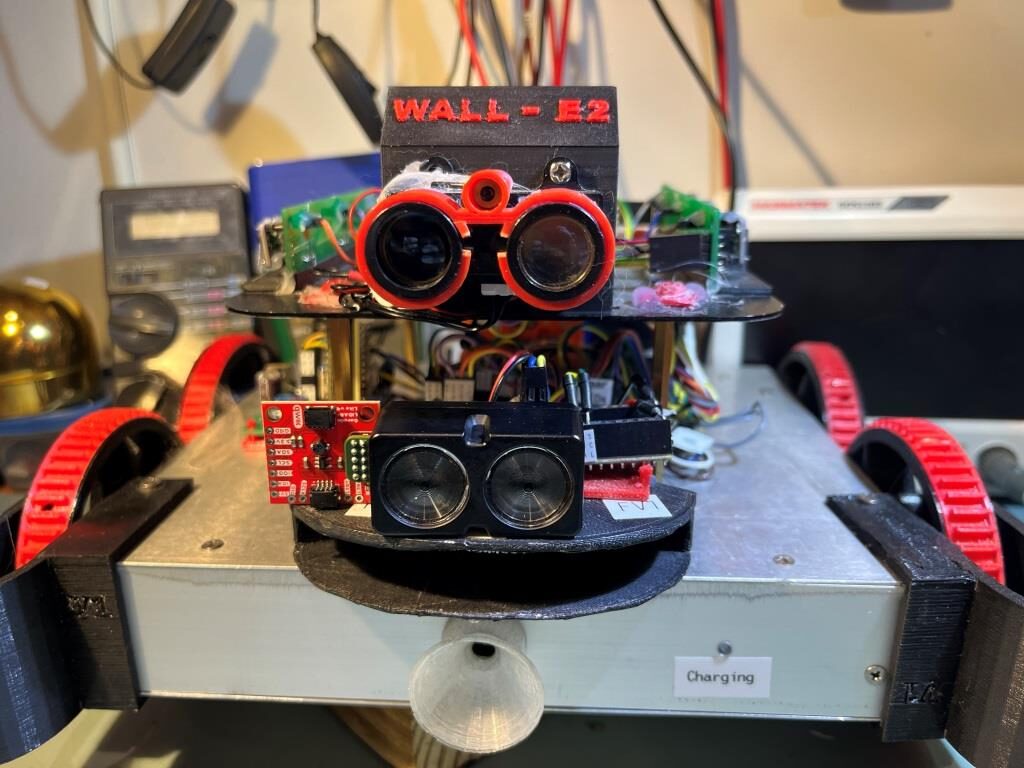
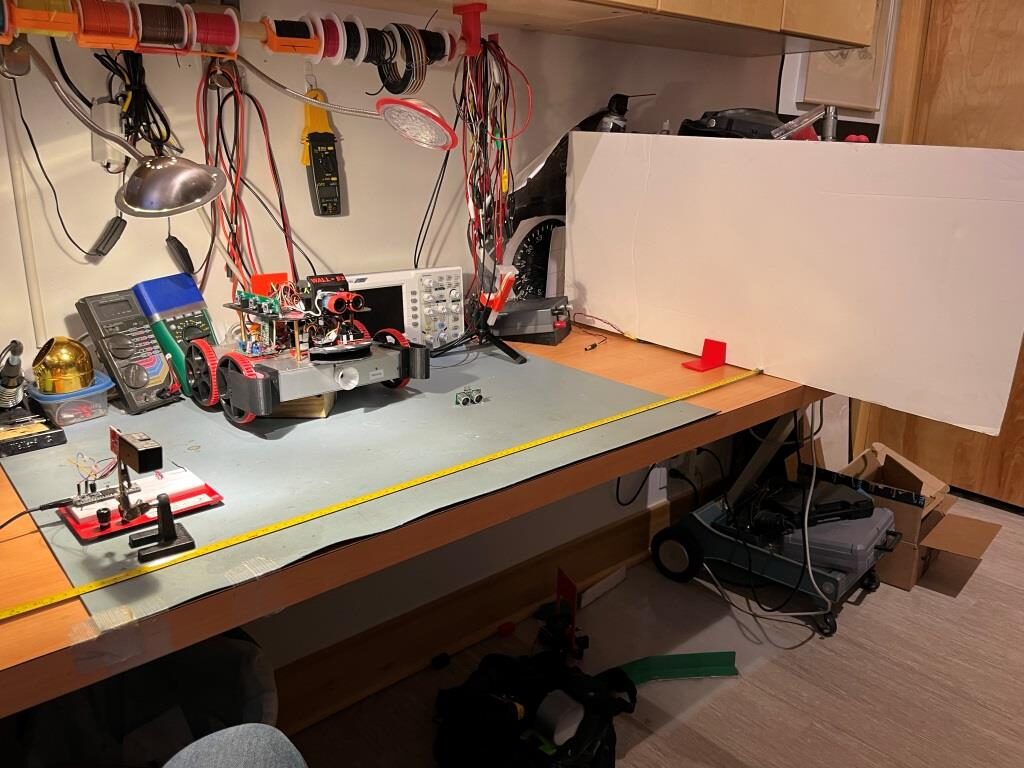
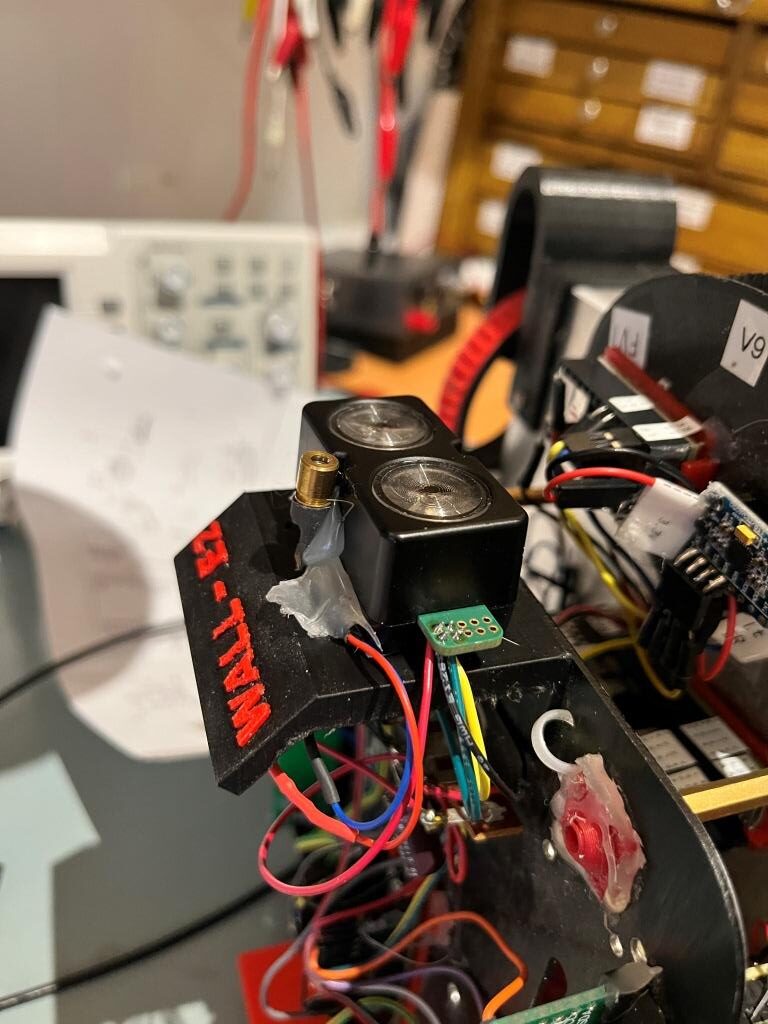
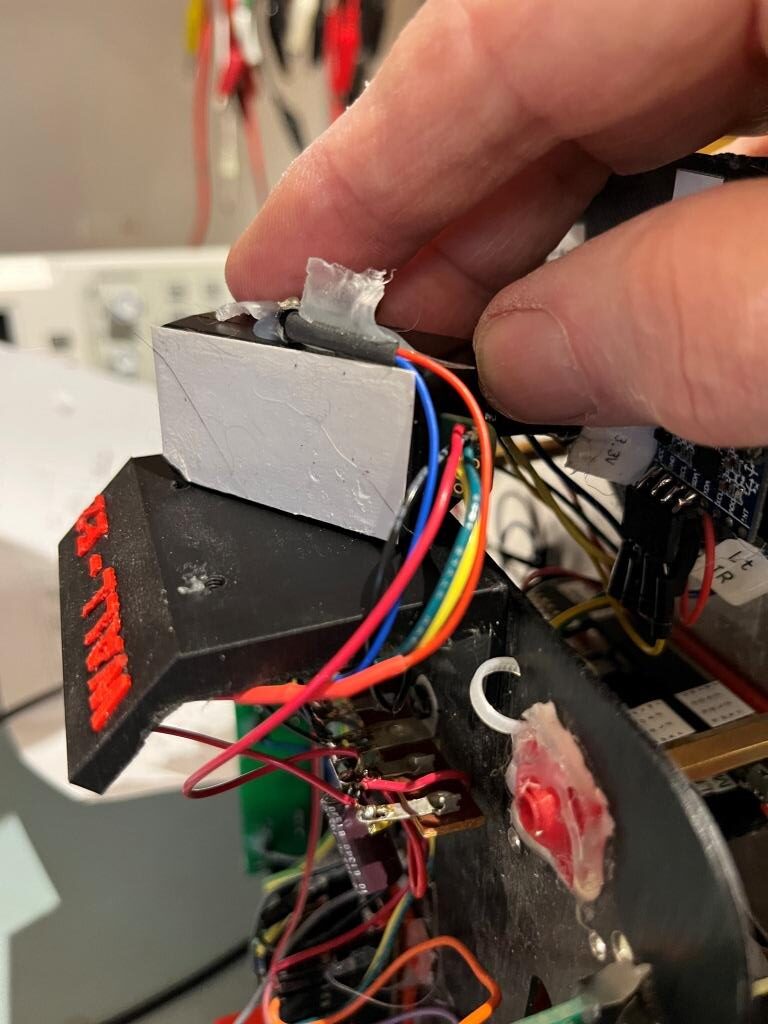
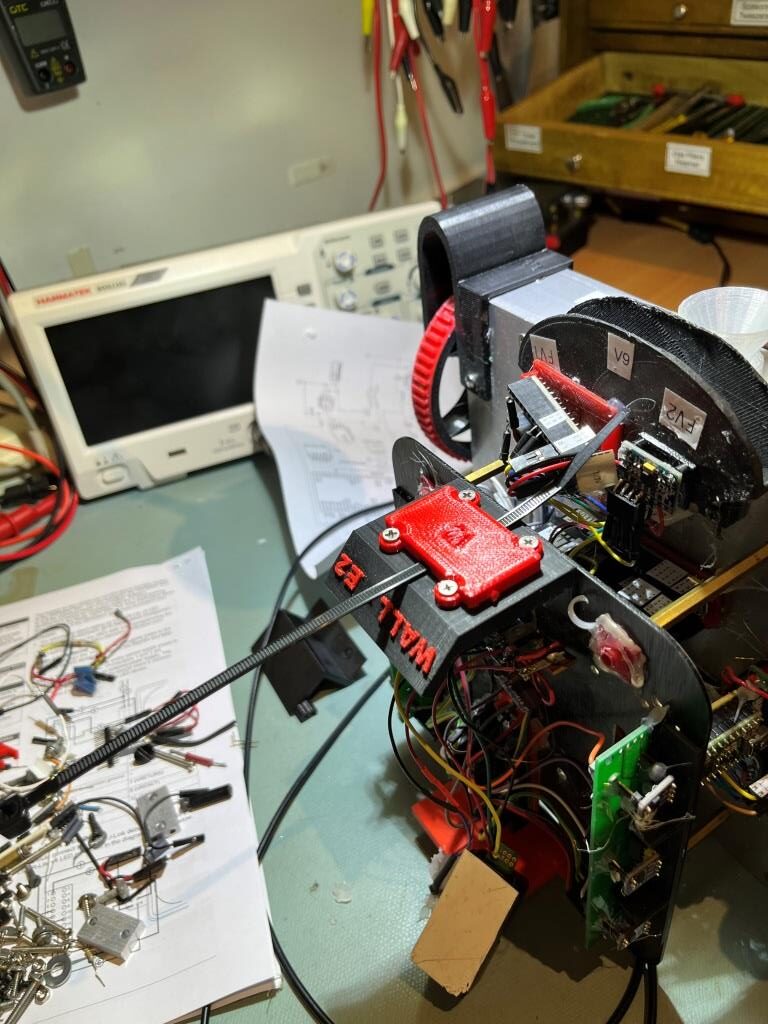
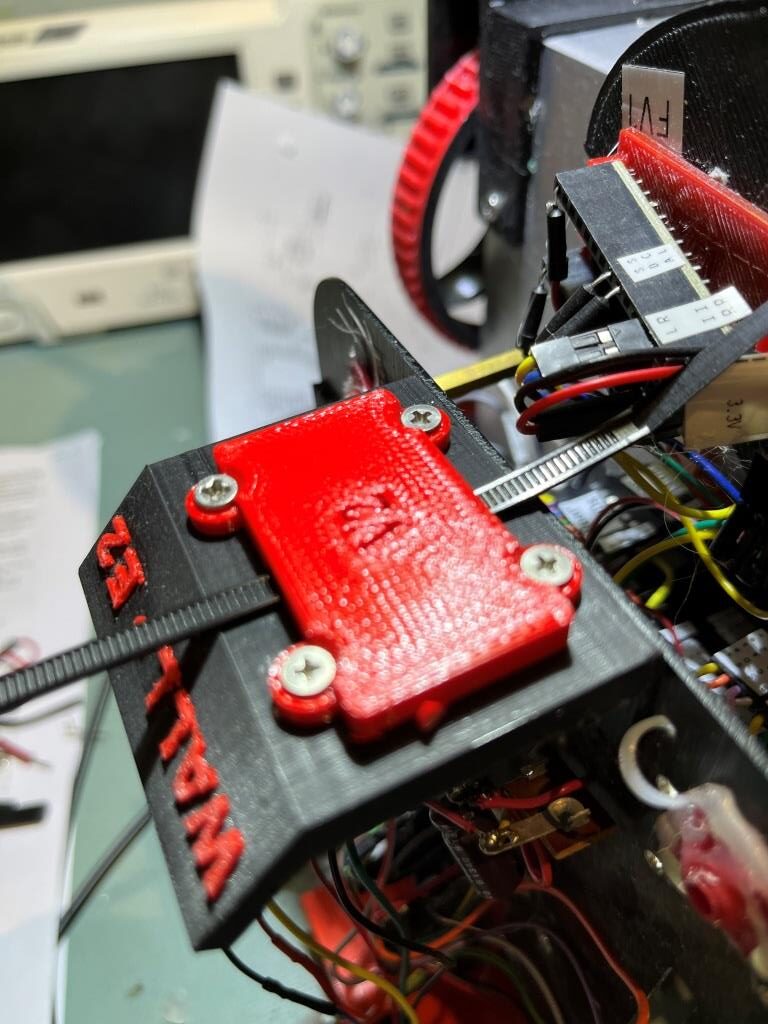
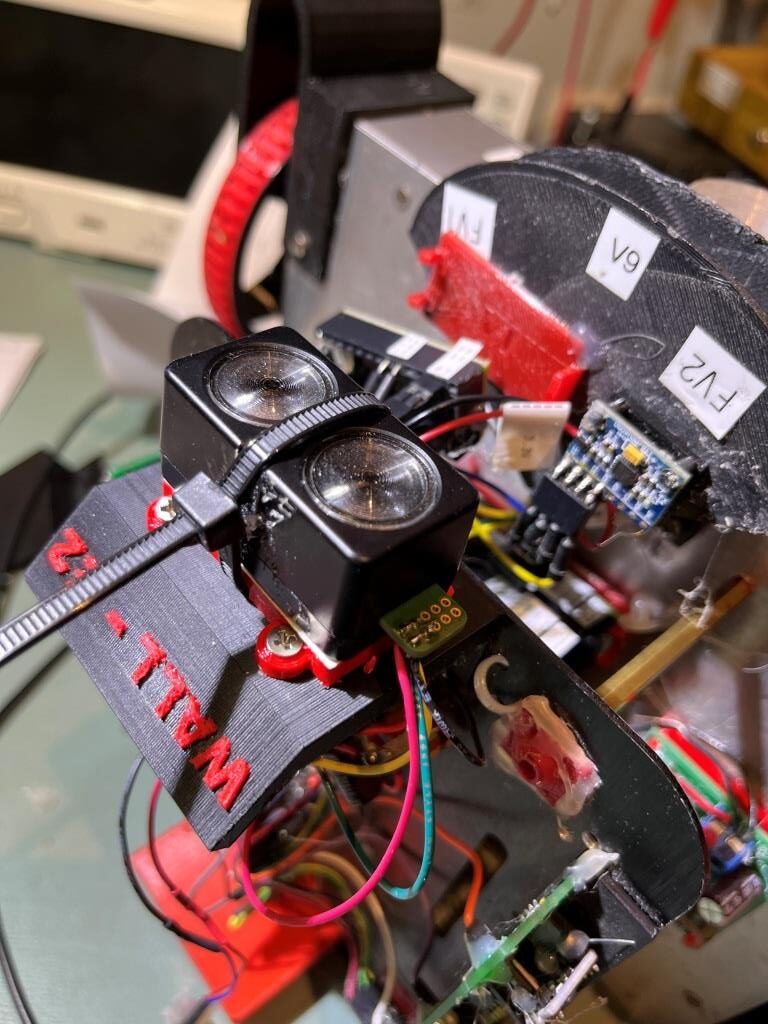
Mounting the Garmin on WallE3 turned out to be non-trivial. The unit doesn’t have mounting flanges like the Pulsed Light unit, and my first attempt with double-sided tape lasted less than an hour – oops! So, I designed a mounting adaptor that picks up the threaded holes used by the Pulsed Light unit and provides a way to mount the Garmin unit with a plastic sta-strap, as shown in the following photos:
Now that I have the Garmin LIDAR working on WallE3, the next step is to integrate the hardware-specific code (the ‘drivers’) into WallE3’s current software.
05 March 2023 Update:
I ported the relevant setup() code from ‘Garmin_LIDARV4_Sparkfun_V1.ino’ to ‘WallE3_Complete_V2.ino’ and the actual driver code to ‘GetFrontDistCm()’. At this point ‘WallE3_Complete_V2.ino’ compiles properly, but I have not tested anything yet.
06 March 2023 Update:
After porting the code as above, I tried to run ‘WallE3_Complete_V2.ino’, but it hung up where it tries to connect to the Garmin LIDAR…. and this is where my painstaking effort to take things in small steps paid off. I am certifiably obsessed with always having a backup and/or a way to retreat to a known-good baseline. With this project it involved the following:
- Before even touching my robot, I got the Sparkfun-supplied Garmin LIDAR (with the Qwiic connector breakout board) working with the Sparkfun library on a Teensy 3.5 on a plugboard – no extra hardware at all, using the default I2C port.
- Then I did the same thing with the Garmin-supplied LIDAR (without the Sparkfun breakout board) on the same plugboard with Garmin library.
- Then I moved the LIDAR to Wire2 on the plugboard mounted Teensy, and verified that the LIDAR and the Sparkfun library (the Garmin library isn’t multi-port capable) operated OK.
- Then I moved the Garmin-supplied LIDAR to my WallE3 robot and connected it to the main Teensy 3.5’s Wire2 port, with just the minimalist test program loaded into the robot’s main Teensy 3.5, and confirmed I could get the same performance as before with the plugboard.
- Finally, I ported the necessary code into my ‘WallE3_Complete_V2.ino’, and tried to run it, at which point it hung up on the check for the LIDAR, as noted above
At this point, I immediately backed up to my ‘last-good’ baseline, with the LIDAR test program loaded onto the Teensy 3.5, and confirmed that it still worked fine. Now I know that the hardware is OK, and the problem has to be something screwy with my robot program. Since the point at which the ‘complete’ program died was in setup(), I also know that the problem has to lie before the LIDAR connection check. I also know that since the connection check succeeded with my small test program but not with the ‘complete’ one, the problem has something to do with the way the I2C ports were set up or initialized. Looking backwards in setup() from the LIDAR connection check, I ran across the following lines:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
#pragma region I2C_PORTS //I2C bus Wire.begin(); //01/31/22 added to enable internal pullups on Wire - the I2C bus connected to //the T3.2 IR Homing processor and the MPU6050 MPU (the MPU does have internal 4.7K pullups installed) CORE_PIN19_CONFIG = PORT_PCR_PE | PORT_PCR_PS | PORT_PCR_MUX(2); CORE_PIN18_CONFIG = PORT_PCR_PE | PORT_PCR_PS | PORT_PCR_MUX(2); Wire1.begin(); //01/31/22 added to enable internal pullups on Wire1 - the I2C buss connected to the T3.5 VL53L0X array processor CORE_PIN37_CONFIG = PORT_PCR_PE | PORT_PCR_PS | PORT_PCR_MUX(2); CORE_PIN38_CONFIG = PORT_PCR_PE | PORT_PCR_PS | PORT_PCR_MUX(2); Wire2.begin(); //02/25/23 added to enable internal pullups on Wire2 - the I2C buss connected to the Garmin LIDAR-Lite V4/LED CORE_PIN3_CONFIG = PORT_PCR_PE | PORT_PCR_PS | PORT_PCR_MUX(2); CORE_PIN4_CONFIG = PORT_PCR_PE | PORT_PCR_PS | PORT_PCR_MUX(2); #pragma endregion I2C_PORTS |
The first two sets of lines in the above snippets were necessary to enable the internal pullup resistors on the main Teensy 3.5’s primary and secondary I2C ports (see this post and this post for all the gory details). The third set of lines was intended to do the same thing (enable the internal ~33KΩ pullups) for Wire2 on pins 3/4), but shouldn’t be needed for the Garmin LIDAR because it provides internal 13KΩ pullups (see this doc, top of column 2 on page 2). I wasn’t sure why having a 13KΩ and 33KΩ pullups would be a problem, but I decided to comment those two lines out and see if it made a difference. Well, as it happened – it did, and now the Garmin LIDAR on I2C port2 (Wire2) responded properly, and with very little additional effort was fully integrated with the rest of the ‘complete’ program.
The reason I took so much time and space describing this relatively minor hiccup in the integration effort is because I wanted to demonstrate how important it is to proceed on a complex task by changing just one thing at a time, and to always have a fallback to a ‘known-good’ baseline. Otherwise you are just asking for an unguided tour through the infinitely turning tunnels down the rabbit-hole.
11 March 2023:
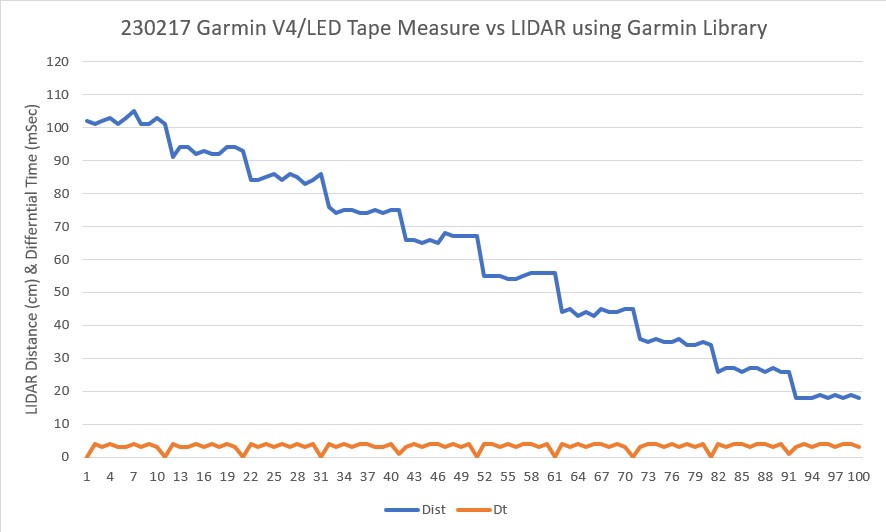
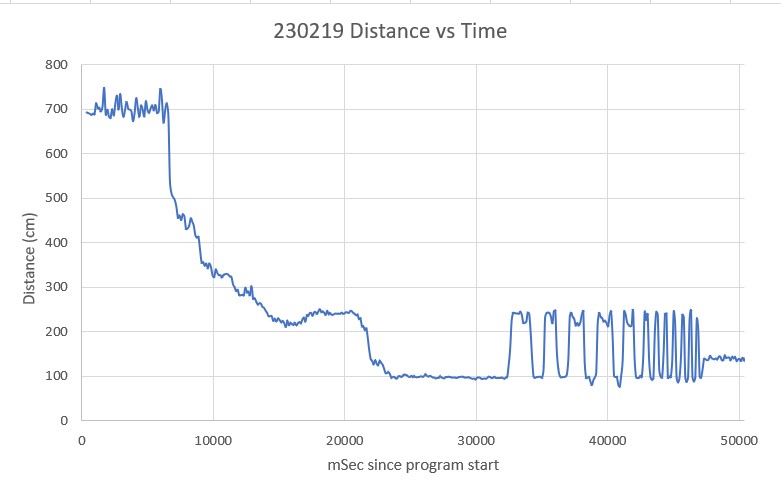
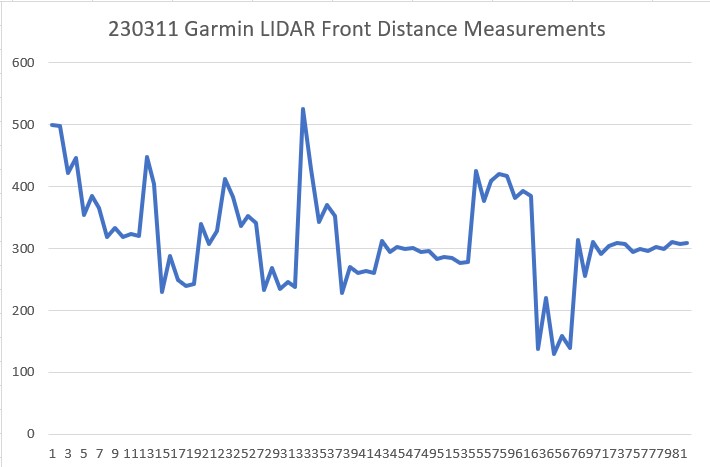
After getting the Garmin LIDAR integrated into WallE3, and cleaning up the normal amount of screwups, I finally got a good run on my office ‘test wall’, and was able to confirm that the Garmin LIDAR was performing well, as shown in the following Excel plot.
Stay Tuned!
Frank