Board Properties
name=Teensy 3.5
upload.maximum_size=524288
upload.maximum_data_size=262136
upload.tool=teensyloader
upload.protocol=halfkay
build.board=TEENSY35
build.core=teensy3
build.mcu=mk64fx512
build.warn_data_percentage=98
build.toolchain=arm/bin/
build.command.gcc=arm-none-eabi-gcc
build.command.g++=arm-none-eabi-g++
build.command.ar=arm-none-eabi-gcc-ar
build.command.objcopy=arm-none-eabi-objcopy
build.command.objdump=arm-none-eabi-objdump
build.command.linker=arm-none-eabi-gcc
build.command.size=arm-none-eabi-size
build.flags.common=-g -Wall -ffunction-sections -fdata-sections -nostdlib
build.flags.dep=-MMD
build.flags.optimize=-O2
build.flags.cpu=-mthumb -mcpu=cortex-m4 -mfloat-abi=hard -mfpu=fpv4-sp-d16 -fsingle-precision-constant
build.flags.defs=-D__MK64FX512__ -DTEENSYDUINO=153
build.flags.cpp=-fno-exceptions -fpermissive -felide-constructors -std=gnu++14 -Wno-error=narrowing -fno-rtti
build.flags.c=
build.flags.S=-x assembler-with-cpp
build.flags.ld=-Wl,--gc-sections,--relax,--defsym=__rtc_localtime={extra.time.local} "-T{build.core.path}/mk64fx512.ld"
build.flags.libs=-larm_cortexM4lf_math -lm -lstdc++
serial.restart_cmd=false
menu.usb.serial=Serial
menu.usb.serial.build.usbtype=USB_SERIAL
menu.usb.serial2=Dual Serial
menu.usb.serial2.build.usbtype=USB_DUAL_SERIAL
menu.usb.serial3=Triple Serial
menu.usb.serial3.build.usbtype=USB_TRIPLE_SERIAL
menu.usb.keyboard=Keyboard
menu.usb.keyboard.build.usbtype=USB_KEYBOARDONLY
menu.usb.keyboard.fake_serial=teensy_gateway
menu.usb.touch=Keyboard + Touch Screen
menu.usb.touch.build.usbtype=USB_TOUCHSCREEN
menu.usb.touch.fake_serial=teensy_gateway
menu.usb.hidtouch=Keyboard + Mouse + Touch Screen
menu.usb.hidtouch.build.usbtype=USB_HID_TOUCHSCREEN
menu.usb.hidtouch.fake_serial=teensy_gateway
menu.usb.hid=Keyboard + Mouse + Joystick
menu.usb.hid.build.usbtype=USB_HID
menu.usb.hid.fake_serial=teensy_gateway
menu.usb.serialhid=Serial + Keyboard + Mouse + Joystick
menu.usb.serialhid.build.usbtype=USB_SERIAL_HID
menu.usb.midi=MIDI
menu.usb.midi.build.usbtype=USB_MIDI
menu.usb.midi.fake_serial=teensy_gateway
menu.usb.midi4=MIDIx4
menu.usb.midi4.build.usbtype=USB_MIDI4
menu.usb.midi4.fake_serial=teensy_gateway
menu.usb.midi16=MIDIx16
menu.usb.midi16.build.usbtype=USB_MIDI16
menu.usb.midi16.fake_serial=teensy_gateway
menu.usb.serialmidi=Serial + MIDI
menu.usb.serialmidi.build.usbtype=USB_MIDI_SERIAL
menu.usb.serialmidi4=Serial + MIDIx4
menu.usb.serialmidi4.build.usbtype=USB_MIDI4_SERIAL
menu.usb.serialmidi16=Serial + MIDIx16
menu.usb.serialmidi16.build.usbtype=USB_MIDI16_SERIAL
menu.usb.audio=Audio
menu.usb.audio.build.usbtype=USB_AUDIO
menu.usb.audio.fake_serial=teensy_gateway
menu.usb.serialmidiaudio=Serial + MIDI + Audio
menu.usb.serialmidiaudio.build.usbtype=USB_MIDI_AUDIO_SERIAL
menu.usb.serialmidi16audio=Serial + MIDIx16 + Audio
menu.usb.serialmidi16audio.build.usbtype=USB_MIDI16_AUDIO_SERIAL
menu.usb.mtp=MTP Disk (Experimental)
menu.usb.mtp.build.usbtype=USB_MTPDISK
menu.usb.mtp.fake_serial=teensy_gateway
menu.usb.rawhid=Raw HID
menu.usb.rawhid.build.usbtype=USB_RAWHID
menu.usb.rawhid.fake_serial=teensy_gateway
menu.usb.flightsim=Flight Sim Controls
menu.usb.flightsim.build.usbtype=USB_FLIGHTSIM
menu.usb.flightsim.fake_serial=teensy_gateway
menu.usb.flightsimjoystick=Flight Sim Controls + Joystick
menu.usb.flightsimjoystick.build.usbtype=USB_FLIGHTSIM_JOYSTICK
menu.usb.flightsimjoystick.fake_serial=teensy_gateway
menu.usb.everything=All of the Above
menu.usb.everything.build.usbtype=USB_EVERYTHING
menu.usb.disable=No USB
menu.usb.disable.build.usbtype=USB_DISABLED
menu.speed.120=120 MHz
menu.speed.96=96 MHz
menu.speed.72=72 MHz
menu.speed.48=48 MHz
menu.speed.24=24 MHz
menu.speed.16=16 MHz (No USB)
menu.speed.8=8 MHz (No USB)
menu.speed.4=4 MHz (No USB)
menu.speed.2=2 MHz (No USB)
menu.speed.144=144 MHz (overclock)
menu.speed.168=168 MHz (overclock)
menu.speed.168.build.fcpu=168000000
menu.speed.144.build.fcpu=144000000
menu.speed.120.build.fcpu=120000000
menu.speed.96.build.fcpu=96000000
menu.speed.72.build.fcpu=72000000
menu.speed.48.build.fcpu=48000000
menu.speed.24.build.fcpu=24000000
menu.speed.16.build.fcpu=16000000
menu.speed.8.build.fcpu=8000000
menu.speed.4.build.fcpu=4000000
menu.speed.2.build.fcpu=2000000
menu.opt.o2std=Faster
menu.opt.o2std.build.flags.optimize=-O2
menu.opt.o2std.build.flags.ldspecs=
menu.opt.o2lto=Faster with LTO
menu.opt.o2lto.build.flags.optimize=-O2 -flto -fno-fat-lto-objects
menu.opt.o2lto.build.flags.ldspecs=-fuse-linker-plugin
menu.opt.o1std=Fast
menu.opt.o1std.build.flags.optimize=-O1
menu.opt.o1std.build.flags.ldspecs=
menu.opt.o1lto=Fast with LTO
menu.opt.o1lto.build.flags.optimize=-O1 -flto -fno-fat-lto-objects
menu.opt.o1lto.build.flags.ldspecs=-fuse-linker-plugin
menu.opt.o3std=Fastest
menu.opt.o3std.build.flags.optimize=-O3
menu.opt.o3std.build.flags.ldspecs=
menu.opt.o3purestd=Fastest + pure-code
menu.opt.o3purestd.build.flags.optimize=-O3 -mpure-code -D__PURE_CODE__
menu.opt.o3purestd.build.flags.ldspecs=
menu.opt.o3lto=Fastest with LTO
menu.opt.o3lto.build.flags.optimize=-O3 -flto -fno-fat-lto-objects
menu.opt.o3lto.build.flags.ldspecs=-fuse-linker-plugin
menu.opt.o3purelto=Fastest + pure-code with LTO
menu.opt.o3purelto.build.flags.optimize=-O3 -mpure-code -D__PURE_CODE__ -flto -fno-fat-lto-objects
menu.opt.o3purelto.build.flags.ldspecs=-fuse-linker-plugin
menu.opt.ogstd=Debug
menu.opt.ogstd.build.flags.optimize=-Og
menu.opt.ogstd.build.flags.ldspecs=
menu.opt.oglto=Debug with LTO
menu.opt.oglto.build.flags.optimize=-Og -flto -fno-fat-lto-objects
menu.opt.oglto.build.flags.ldspecs=-fuse-linker-plugin
menu.opt.osstd=Smallest Code
menu.opt.osstd.build.flags.optimize=-Os --specs=nano.specs
menu.opt.osstd.build.flags.ldspecs=
menu.opt.oslto=Smallest Code with LTO
menu.opt.oslto.build.flags.optimize=-Os -flto -fno-fat-lto-objects --specs=nano.specs
menu.opt.oslto.build.flags.ldspecs=-fuse-linker-plugin
menu.keys.en-us=US English
menu.keys.en-us.build.keylayout=US_ENGLISH
menu.keys.fr-ca=Canadian French
menu.keys.fr-ca.build.keylayout=CANADIAN_FRENCH
menu.keys.xx-ca=Canadian Multilingual
menu.keys.xx-ca.build.keylayout=CANADIAN_MULTILINGUAL
menu.keys.cz-cz=Czech
menu.keys.cz-cz.build.keylayout=CZECH
menu.keys.da-da=Danish
menu.keys.da-da.build.keylayout=DANISH
menu.keys.fi-fi=Finnish
menu.keys.fi-fi.build.keylayout=FINNISH
menu.keys.fr-fr=French
menu.keys.fr-fr.build.keylayout=FRENCH
menu.keys.fr-be=French Belgian
menu.keys.fr-be.build.keylayout=FRENCH_BELGIAN
menu.keys.fr-ch=French Swiss
menu.keys.fr-ch.build.keylayout=FRENCH_SWISS
menu.keys.de-de=German
menu.keys.de-de.build.keylayout=GERMAN
menu.keys.de-dm=German (Mac)
menu.keys.de-dm.build.keylayout=GERMAN_MAC
menu.keys.de-ch=German Swiss
menu.keys.de-ch.build.keylayout=GERMAN_SWISS
menu.keys.is-is=Icelandic
menu.keys.is-is.build.keylayout=ICELANDIC
menu.keys.en-ie=Irish
menu.keys.en-ie.build.keylayout=IRISH
menu.keys.it-it=Italian
menu.keys.it-it.build.keylayout=ITALIAN
menu.keys.no-no=Norwegian
menu.keys.no-no.build.keylayout=NORWEGIAN
menu.keys.pt-pt=Portuguese
menu.keys.pt-pt.build.keylayout=PORTUGUESE
menu.keys.pt-br=Portuguese Brazilian
menu.keys.pt-br.build.keylayout=PORTUGUESE_BRAZILIAN
menu.keys.rs-rs=Serbian (Latin Only)
menu.keys.rs-rs.build.keylayout=SERBIAN_LATIN_ONLY
menu.keys.es-es=Spanish
menu.keys.es-es.build.keylayout=SPANISH
menu.keys.es-mx=Spanish Latin America
menu.keys.es-mx.build.keylayout=SPANISH_LATIN_AMERICA
menu.keys.sv-se=Swedish
menu.keys.sv-se.build.keylayout=SWEDISH
menu.keys.tr-tr=Turkish (partial)
menu.keys.tr-tr.build.keylayout=TURKISH
menu.keys.en-gb=United Kingdom
menu.keys.en-gb.build.keylayout=UNITED_KINGDOM
menu.keys.usint=US International
menu.keys.usint.build.keylayout=US_INTERNATIONAL
runtime.ide.path=C:\Program Files (x86)\Arduino
runtime.os=windows
build.system.path=C:\Program Files (x86)\Arduino\hardware\teensy\avr\system
runtime.ide.version=108013
target_package=teensy
target_platform=teensy3
runtime.hardware.path=C:\Program Files (x86)\Arduino\hardware\teensy
originalid=teensy35
vm.run_sketch_prebuild_before_build=true
intellisense.include.paths.more={vmresolved.compiler.path}arm\arm-none-eabi\include;{vmresolved.compiler.path}arm\lib\gcc\arm-none-eabi\5.4.1\include;{vmresolved.compiler.path}arm\arm-none-eabi\include\c++\5.4.1;{vmresolved.compiler.path}arm\arm-none-eabi\include\c++\5.4.1\tr1;{vmresolved.compiler.path}arm\arm-none-eabi\include\c++\5.4.1\bits;{vmresolved.compiler.path}arm\arm-none-eabi\include\c++\5.4.1\arm-none-eabi;
vmboard.totalpins=16
vmboard.totalanalogpins=14
tools.teensy_gdbstub.cmd=arm-none-eabi-gdb.exe
tools.teensy_gdbstub.debug.path={runtime.hardware.path}/../tools/arm/bin
tools.teensy_gdbstub.initCmd=-ex "init halt"
vs-cmd.Debug.AttachtoProcess.tools.teensy_gdbstub.initCmd=-ex "init"
tools.teensy_gdbstub.debug.args=-ex "target remote \\.\{serial.debug.port}" {initCmd}
build.vm.ignore_gdb_extra_flags=1
tools.teensy_gdbstub.showLocalSerialPort=true
debug_menu.hwdebugger.teensy=GDBStub
debug_menu.hwdebugger.teensy.debug.tool=teensy_gdbstub
meta_teensy.sentence=This debugger requires the TeensyDebug Library from https://github.com/ftrias/TeensyDebug to be installed, and the <TeensyDebug.h> to be included, as well as a call to debug.begin(Serialxx);
meta_teensy.comment=Ensure the COM Port for the configured Debug Port is selected before attaching the Debugger, depending on your code. . Set vMicro > Debugger > 'Compiler Optimization' to 'No Project', 'No Project + Libraries' or 'None' when debugging. (NOTE: Changing the optimization setting for this platform might cause compilation errors with certain code such as HardwareSerial.)
meta_teensy.image.connect=https://www.visualmicro.com/pics/Debug-Help-TEENSY4-GDBSTUB-Connections.png
meta_teensy.image.operation=https://www.visualmicro.com/pics/Debug-Break-TEENSY4-GDBSTUB-VSOnly.png
meta_teensy.reference.usage.url=https://www.visualmicro.com/page/User-Guide.aspx?doc=Arduino-gdb-Tutorial.html
version=1.8.5
rewriting=disabled
compiler.path={runtime.hardware.path}/../tools/
compiler.objcopy.eep.flags=-O ihex -j .eeprom --set-section-flags=.eeprom=alloc,load --no-change-warnings --change-section-lma .eeprom=0
compiler.elf2hex.flags=-O ihex -R .eeprom
recipe.preproc.includes="{compiler.path}{build.toolchain}{build.command.g++}" -M -MG -MP -x c++ -w {build.flags.cpp} {build.flags.cpu} {build.flags.defs} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DF_CPU={build.fcpu} -D{build.usbtype} -DLAYOUT_{build.keylayout} {includes} "{source_file}"
recipe.preproc.macros="{compiler.path}{build.toolchain}{build.command.g++}" -E -CC -x c++ -w {compiler.cpp.flags} {build.flags.common} {build.flags.cpp} {build.flags.cpu} {build.flags.defs} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DF_CPU={build.fcpu} -D{build.usbtype} -DLAYOUT_{build.keylayout} {includes} "{source_file}" -o "{preprocessed_file_path}"
tools.arduino-preprocessor.path={runtime.tools.arduino-preprocessor.path}
tools.arduino-preprocessor.cmd.path={path}/arduino-preprocessor
tools.arduino-preprocessor.pattern="{cmd.path}" "{source_file}" "{codecomplete}" -- -std=gnu++14
recipe.hooks.sketch.prebuild.1.pattern="{compiler.path}precompile_helper" "{runtime.platform.path}/cores/{build.core}" "{build.path}" "{compiler.path}{build.toolchain}{build.command.g++}" -x c++-header {build.flags.optimize} {build.flags.common} {build.flags.dep} {build.flags.cpp} {build.flags.cpu} {build.flags.defs} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DF_CPU={build.fcpu} -D{build.usbtype} -DLAYOUT_{build.keylayout} "-I{runtime.platform.path}/cores/{build.core}" "{build.path}/pch/Arduino.h" -o "{build.path}/pch/Arduino.h.gch"
recipe.cpp.o.pattern="{compiler.path}{build.toolchain}{build.command.g++}" -c {build.flags.optimize} {build.flags.common} {build.flags.dep} {build.flags.cpp} {build.flags.cpu} {build.flags.defs} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DF_CPU={build.fcpu} -D{build.usbtype} -DLAYOUT_{build.keylayout} "-I{build.path}/pch" {includes} "{source_file}" -o "{object_file}"
recipe.c.o.pattern="{compiler.path}{build.toolchain}{build.command.gcc}" -c {build.flags.optimize} {build.flags.common} {build.flags.dep} {build.flags.c} {build.flags.cpu} {build.flags.defs} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DF_CPU={build.fcpu} -D{build.usbtype} -DLAYOUT_{build.keylayout} {includes} "{source_file}" -o "{object_file}"
recipe.S.o.pattern="{compiler.path}{build.toolchain}{build.command.gcc}" -c {build.flags.optimize} {build.flags.common} {build.flags.dep} {build.flags.S} {build.flags.cpu} {build.flags.defs} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DF_CPU={build.fcpu} -D{build.usbtype} -DLAYOUT_{build.keylayout} {includes} "{source_file}" -o "{object_file}"
recipe.ar.pattern="{compiler.path}{build.toolchain}{build.command.ar}" rcs "{archive_file_path}" "{object_file}"
recipe.c.combine.pattern="{compiler.path}{build.toolchain}{build.command.linker}" {build.flags.optimize} {build.flags.ld} {build.flags.ldspecs} {build.flags.cpu} -o "{build.path}/{build.project_name}.elf" {object_files} "{build.path}/{archive_file}" "-L{build.path}" {build.flags.libs}
recipe.elfpatch.pattern="{compiler.path}/hardware/tools/{build.elfpatch}" -mmcu={build.mcu} "{build.path}/{build.project_name}.elf" "{sketch_path}/disk"
recipe.objcopy.eep.pattern="{compiler.path}{build.toolchain}{build.command.objcopy}" {compiler.objcopy.eep.flags} "{build.path}/{build.project_name}.elf" "{build.path}/{build.project_name}.eep"
recipe.objcopy.hex.pattern="{compiler.path}{build.toolchain}{build.command.objcopy}" {compiler.elf2hex.flags} "{build.path}/{build.project_name}.elf" "{build.path}/{build.project_name}.hex"
recipe.hooks.postbuild.1.pattern="{compiler.path}stdout_redirect" "{build.path}/{build.project_name}.lst" "{compiler.path}{build.toolchain}{build.command.objdump}" -d -S -C "{build.path}/{build.project_name}.elf"
recipe.hooks.postbuild.2.pattern="{compiler.path}stdout_redirect" "{build.path}/{build.project_name}.sym" "{compiler.path}{build.toolchain}{build.command.objdump}" -t -C "{build.path}/{build.project_name}.elf"
recipe.hooks.postbuild.3.pattern="{compiler.path}teensy_post_compile" "-file={build.project_name}" "-path={build.path}" "-tools={compiler.path}" "-board={build.board}"
recipe.size.pattern="{compiler.path}{build.toolchain}{build.command.size}" -A "{build.path}/{build.project_name}.elf"
recipe.size.regex=^(?:\.text|\.text\.progmem|\.text\.itcm|\.data)\s+([0-9]+).*
recipe.size.regex.data=^(?:\.usbdescriptortable|\.dmabuffers|\.usbbuffers|\.data|\.bss|\.noinit|\.text\.itcm|\.text\.itcm\.padding)\s+([0-9]+).*
recipe.size.regex.eeprom=^(?:\.eeprom)\s+([0-9]+).*
discovery.teensy.pattern="{runtime.hardware.path}/../tools/teensy_ports" -J2
tools.teensyloader.cmd.path={runtime.hardware.path}/../tools
tools.teensyloader.upload.params.quiet=
tools.teensyloader.upload.params.verbose=-verbose
tools.teensyloader.upload.pattern="{cmd.path}/teensy_post_compile" "-file={build.project_name}" "-path={build.path}" "-tools={cmd.path}" "-board={build.board}" -reboot "-port={serial.port}" "-portlabel={serial.port.label}" "-portprotocol={serial.port.protocol}"
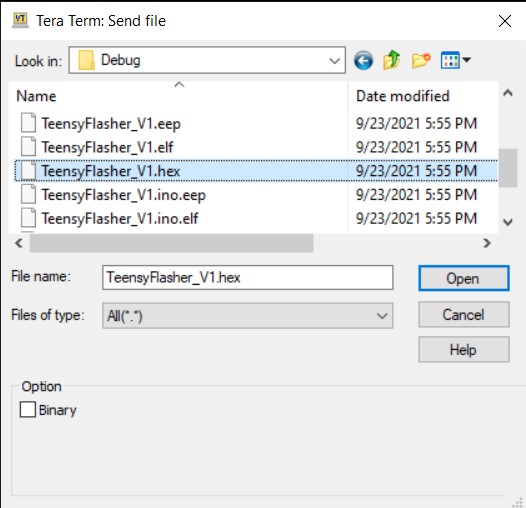
recipe.output.tmp_file={build.project_name}.hex
recipe.output.save_file={build.project_name}.{build.board}.hex
recipe.output.tmp_file2={build.project_name}.elf
recipe.output.save_file2={build.project_name}.elf
upload.verify=
tools.vmopenocd.cmd=bin/openocd.exe
tools.vmopenocd.cmd.windows=bin/openocd.exe
tools.vmopenocd.debug.params.verbose=-d2
tools.vmopenocd.debug.params.quiet=-d0
tools.vmopenocd.debug.address=localhost:3333
tools.vmopenocd.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.vmopenocd.scriptPath=-s "{path}/scripts/"
tools.vmopenocd.logging=-l "{{build.path}/{build.project_name}_DebugOpenOCD.log}"
tools.vmopenocd.boardCmd=
tools.vmopenocd.targetCmd=
tools.vmopenocd.initCmd=
tools.vmopenocd.debug.pattern="{path}/{cmd}" {debug.verbose} {logging} {scriptPath} {boardCmd} {targetCmd} {initCmd}
tools.vmopenocd.program.cmd=bin/openocd.exe
tools.vmopenocd.program.cmd.windows=bin/openocd.exe
tools.vmopenocd.program.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.vmopenocd.program.address=localhost:3333
tools.vmopenocd.program.params.verbose=-d2
tools.vmopenocd.program.params.quiet=-d0
tools.vmopenocd.program.elf.message=****[vMicro]**** Uploading ELF :
tools.vmopenocd.program.pattern="{path}/{cmd}" {program.verbose} {scriptPath} {boardCmd} {targetCmd} -c "echo -n {{program.elf.message}}" {programCmd}
tools.atmelICE.protocol=
tools.atmelICE.debug.cmd=arm-none-eabi-gdb.exe
tools.atmelICE.debug.path={runtime.tools.arm-none-eabi-gcc.path}/bin
tools.atmelICE.debug.pattern="{path}/{cmd}"
tools.atmelICE.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.atmelICE.server.initCmd=-c "init"
tools.atmelICE.server.boardCmd=-c "adapter driver cmsis-dap" -c "cmsis_dap_vid_pid 0x03eb 0x2141"
tools.atmelICE.server.tool=vmopenocd
tools.atmelICE.debug.server=vmopenocd
tools.atmelICE.program.scriptPath=-s "{program.path}/scripts/"
tools.atmelICE.program.boardCmd=-c "adapter driver cmsis-dap" -c "cmsis_dap_vid_pid 0x03eb 0x2141"
tools.atmelICE.program.cmd=bin/openocd.exe
tools.atmelICE.program.cmd.windows=bin/openocd.exe
tools.atmelICE.program.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.atmelICE.program.address=localhost:3333
tools.atmelICE.program.params.verbose=-d2
tools.atmelICE.program.params.quiet=-d0
tools.atmelICE.program.elf.message=****[vMicro]**** Uploading ELF :
tools.atmelICE.program.pattern="{program.path}/{program.cmd}" {program.verbose} {program.scriptPath} {program.boardCmd} {program.targetCmd} -c "echo -n {{program.elf.message}}" {program.programCmd}
tools.atmelICE.program.extra_params=
tools.atmelICE.program.protocol=
tools.atmelICE.erase.params.verbose=-d3
tools.atmelICE.erase.params.quiet=-d0
tools.atmelICE.erase.pattern=
tools.jlink.cmd=arm-none-eabi-gdb.exe
tools.jlink.path={runtime.tools.arm-none-eabi-gcc.path}/bin
tools.jlink.pattern="{path}/{cmd}"
tools.jlink.server.tool=vmopenocd
tools.jlink.debug.server=vmopenocd
tools.jlink.server.boardCmd=-f "interface/jlink.cfg"
tools.jlink.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.jlink.server.initCmd=-c "init"
tools.jlink.program.scriptPath=-s "{program.path}/scripts/"
tools.jlink.program.boardCmd=-f "interface/jlink.cfg"
tools.jlink.program.cmd=bin/openocd.exe
tools.jlink.program.cmd.windows=bin/openocd.exe
tools.jlink.program.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.jlink.program.address=localhost:3333
tools.jlink.program.params.verbose=-d2
tools.jlink.program.params.quiet=-d0
tools.jlink.program.elf.message=****[vMicro]**** Uploading ELF :
tools.jlink.program.pattern="{program.path}/{program.cmd}" {program.verbose} {program.scriptPath} {program.boardCmd} {program.targetCmd} -c "echo -n {{program.elf.message}}" {program.programCmd}
tools.jlink.upload.scriptPath=-s "{upload.path}/scripts/"
tools.jlink.upload.boardCmd=-f "interface/jlink.cfg"
tools.jlink.upload.cmd=bin/openocd.exe
tools.jlink.upload.cmd.windows=bin/openocd.exe
tools.jlink.upload.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.jlink.upload.address=localhost:3333
tools.jlink.upload.params.verbose=-d2
tools.jlink.upload.params.quiet=-d0
tools.jlink.upload.elf.message=****[vMicro]**** Uploading ELF :
tools.jlink.upload.pattern="{upload.path}/{upload.cmd}" {upload.verbose} {upload.scriptPath} {upload.boardCmd} {upload.targetCmd} -c "echo -n {{upload.elf.message}}" {upload.programCmd}
tools.bmp_upload.cmd=arm-none-eabi-gdb.exe
tools.bmp_upload.debug.path={runtime.tools.arm-none-eabi-gcc.path}/bin/
tools.bmp_upload.program.cmd=bin/arm-none-eabi-gdb.exe
tools.bmp_upload.program.cmd.windows=bin/arm-none-eabi-gdb.exe
tools.bmp_upload.program.path={runtime.tools.arm-none-eabi-gcc.path}
tools.bmp_upload.upload.cmd=bin/arm-none-eabi-gdb.exe
tools.bmp_upload.upload.cmd.windows=bin/arm-none-eabi-gdb.exe
tools.bmp_upload.upload.path={runtime.tools.arm-none-eabi-gcc.path}
tools.bmp_upload.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.bmp_upload.server.initCmd=-c "init"
tools.bmp_upload.showLocalSerialPort=true
tools.bmp_upload.debug.server=
tools.stlinkv2.description=
tools.stlinkv2.cmd=arm-none-eabi-gdb.exe
tools.stlinkv2.path={runtime.tools.arm-none-eabi-gcc.path}/bin
tools.stlinkv2.pattern="{path}/{cmd}"
tools.stlinkv2.server.tool=vmopenocd
tools.stlinkv2.debug.server=vmopenocd
tools.stlinkv2.server.boardCmd=-f "interface/stlink.cfg"
tools.stlinkv2.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.stlinkv2.server.initCmd=-c "init"
tools.stlinkv2.upload.scriptPath=-s "{upload.path}/scripts/"
tools.stlinkv2.upload.boardCmd=-f "interface/stlink.cfg"
tools.stlinkv2.upload.cmd=bin/openocd.exe
tools.stlinkv2.upload.cmd.windows=bin/openocd.exe
tools.stlinkv2.upload.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.stlinkv2.upload.address=localhost:3333
tools.stlinkv2.upload.params.verbose=-d2
tools.stlinkv2.upload.params.quiet=-d0
tools.stlinkv2.upload.elf.message=****[vMicro]**** Uploading ELF :
tools.stlinkv2.upload.pattern="{upload.path}/{upload.cmd}" {upload.verbose} {upload.scriptPath} {upload.boardCmd} {upload.targetCmd} -c "echo -n {{upload.elf.message}}" {upload.programCmd}
tools.stlinkv2.upload.extra_params=
tools.stlinkv2.upload.protocol=
tools.stlinkv2.protocol=
tools.f2232mm.cmd=arm-none-eabi-gdb.exe
tools.f2232mm.path={runtime.tools.arm-none-eabi-gcc.path}/bin
tools.f2232mm.pattern="{path}/{cmd}" {args}
tools.f2232mm.server.tool=vmopenocd
tools.f2232mm.debug.server=vmopenocd
tools.f2232mm.server.boardCmd=-f "interface/ftdi/minimodule.cfg"
tools.f2232mm.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.f2232mm.server.initCmd=-c "init"
tools.f2232mm.upload.scriptPath=-s "{upload.path}/scripts/"
tools.f2232mm.upload.boardCmd=-f "interface/ftdi/minimodule.cfg"
tools.f2232mm.upload.cmd=bin/openocd.exe
tools.f2232mm.upload.cmd.windows=bin/openocd.exe
tools.f2232mm.upload.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.f2232mm.upload.address=localhost:3333
tools.f2232mm.upload.params.verbose=-d2
tools.f2232mm.upload.params.quiet=-d0
tools.f2232mm.upload.elf.message=****[vMicro]**** Uploading ELF :
tools.f2232mm.upload.pattern="{upload.path}/{upload.cmd}" {upload.verbose} {upload.scriptPath} {upload.boardCmd} {upload.targetCmd} -c "echo -n {{upload.elf.message}}" {upload.programCmd}
tools.f2232mm.upload.extra_params=
tools.f2232mm.upload.protocol=
tools.f2232mm.protocol=
tools.f2232h.server.boardCmd=-f "interface/ftdi/minimodule-lowcost.cfg"
tools.f2232h.cmd=arm-none-eabi-gdb.exe
tools.f2232h.path={runtime.tools.arm-none-eabi-gcc.path}/bin
tools.f2232h.pattern="{path}/{cmd}"
tools.f2232h.server.tool=vmopenocd
tools.f2232h.debug.server=vmopenocd
tools.f2232h.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.f2232h.server.initCmd=-c "init"
tools.f2232h.upload.scriptPath=-s "{upload.path}/scripts/"
tools.f2232h.upload.boardCmd=-f "interface/ftdi/minimodule-lowcost.cfg"
tools.f2232h.upload.cmd=bin/openocd.exe
tools.f2232h.upload.cmd.windows=bin/openocd.exe
tools.f2232h.upload.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.f2232h.upload.address=localhost:3333
tools.f2232h.upload.params.verbose=-d2
tools.f2232h.upload.params.quiet=-d0
tools.f2232h.upload.elf.message=****[vMicro]**** Uploading ELF :
tools.f2232h.upload.pattern="{upload.path}/{upload.cmd}" {upload.verbose} {upload.scriptPath} {upload.boardCmd} {upload.targetCmd} -c "echo -n {{upload.elf.message}}" {upload.programCmd}
tools.f2232h.upload.extra_params=
tools.f2232h.upload.protocol=
tools.f2232h.protocol=
tools.daplink.server.boardCmd=-f "interface/cmsis-dap.cfg" -c "adapter speed 1000"
tools.daplink.cmd=arm-none-eabi-gdb.exe
tools.daplink.path={runtime.tools.arm-none-eabi-gcc.path}/bin
tools.daplink.pattern="{path}/{cmd}" {args}
tools.daplink.server.tool=vmopenocd
tools.daplink.debug.server=vmopenocd
tools.daplink.server.initCmd=-c "init; reset halt"
vs-cmd.Debug.AttachtoProcess.tools.daplink.server.initCmd=-c "init"
tools.daplink.upload.scriptPath=-s "{upload.path}/scripts/"
tools.daplink.upload.boardCmd=-f "interface/cmsis-dap.cfg" -c "adapter speed 1000"
tools.daplink.upload.cmd=bin/openocd.exe
tools.daplink.upload.cmd.windows=bin/openocd.exe
tools.daplink.upload.path={runtime.tools.openocd-0.10.0.20200213.path}
tools.daplink.upload.address=localhost:3333
tools.daplink.upload.params.verbose=-d2
tools.daplink.upload.params.quiet=-d0
tools.daplink.upload.elf.message=****[vMicro]**** Uploading ELF :
tools.daplink.upload.pattern="{upload.path}/{upload.cmd}" {upload.verbose} {upload.scriptPath} {upload.boardCmd} {upload.targetCmd} -c "echo -n {{upload.elf.message}}" {upload.programCmd}
tools.daplink.upload.extra_params=
tools.daplink.upload.protocol=
tools.daplink.protocol=
vm.platform.root.path=c:\program files (x86)\microsoft visual studio\2019\community\common7\ide\extensions\53lzl3xe.1x1\Micro Platforms\arduino16x
runtime.tools.arduinoOTA.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\arduinoOTA\1.3.0
runtime.tools.arduinoOTA-1.3.0.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\arduinoOTA\1.3.0
runtime.tools.arm-none-eabi-gcc.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\arm-none-eabi-gcc\4.8.3-2014q1
runtime.tools.arm-none-eabi-gcc-4.8.3-2014q1.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\arm-none-eabi-gcc\4.8.3-2014q1
runtime.tools.avrdude.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\avrdude\6.3.0-arduino17
runtime.tools.avrdude-6.3.0-arduino17.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\avrdude\6.3.0-arduino17
runtime.tools.avr-gcc.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\avr-gcc\7.3.0-atmel3.6.1-arduino7
runtime.tools.avr-gcc-7.3.0-atmel3.6.1-arduino7.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\avr-gcc\7.3.0-atmel3.6.1-arduino7
runtime.tools.bossac.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\bossac\1.6.1-arduino
runtime.tools.bossac-1.6.1-arduino.path=C:\Users\Frank\AppData\Local\arduino15\packages\arduino\tools\bossac\1.6.1-arduino
runtime.tools.CMSIS.path=C:\Users\Frank\AppData\Local\arduino15\packages\STM32\tools\CMSIS\5.5.1
runtime.tools.CMSIS-5.5.1.path=C:\Users\Frank\AppData\Local\arduino15\packages\STM32\tools\CMSIS\5.5.1
runtime.tools.esptool_py.path=C:\Users\Frank\AppData\Local\arduino15\packages\esp32\tools\esptool_py\3.0.0
runtime.tools.esptool_py-3.0.0.path=C:\Users\Frank\AppData\Local\arduino15\packages\esp32\tools\esptool_py\3.0.0
runtime.tools.mkspiffs.path=C:\Users\Frank\AppData\Local\arduino15\packages\esp32\tools\mkspiffs\0.2.3
runtime.tools.mkspiffs-0.2.3.path=C:\Users\Frank\AppData\Local\arduino15\packages\esp32\tools\mkspiffs\0.2.3
runtime.tools.STM32Tools.path=C:\Users\Frank\AppData\Local\arduino15\packages\STM32\tools\STM32Tools\1.4.0
runtime.tools.STM32Tools-1.4.0.path=C:\Users\Frank\AppData\Local\arduino15\packages\STM32\tools\STM32Tools\1.4.0
runtime.tools.xpack-arm-none-eabi-gcc.path=C:\Users\Frank\AppData\Local\arduino15\packages\STM32\tools\xpack-arm-none-eabi-gcc\9.2.1-1.1
runtime.tools.xpack-arm-none-eabi-gcc-9.2.1-1.1.path=C:\Users\Frank\AppData\Local\arduino15\packages\STM32\tools\xpack-arm-none-eabi-gcc\9.2.1-1.1
runtime.tools.xtensa-esp32-elf-gcc.path=C:\Users\Frank\AppData\Local\arduino15\packages\esp32\tools\xtensa-esp32-elf-gcc\1.22.0-97-gc752ad5-5.2.0
runtime.tools.xtensa-esp32-elf-gcc-1.22.0-97-gc752ad5-5.2.0.path=C:\Users\Frank\AppData\Local\arduino15\packages\esp32\tools\xtensa-esp32-elf-gcc\1.22.0-97-gc752ad5-5.2.0
runtime.vm.boardinfo.id=teensy35
runtime.vm.boardinfo.name=teensy35
runtime.vm.boardinfo.desc=Teensy 3.5
runtime.vm.boardinfo.src_location=C:\Program Files (x86)\Arduino\hardware\teensy\avr
ide.hint=Use installed IDE (hardware, reference/help + libraries)
ide.location.key=Arduino16x
ide.location.ide.winreg=Arduino 1.6.x Application
ide.location.sketchbook.winreg=Arduino 1.6.x Sketchbook
ide.location.sketchbook.preferences=sketchbook.path
ide.default.revision_name=1.8.13
ide.default.version=10800
ide.default.package=arduino
ide.default.platform=avr
ide.multiplatform=true
ide.includes=Arduino.h
ide.exe_name=arduino
ide.recipe.preproc.defines.flags=-w -x c++ -E -dM
ide.platformswithoutpackage=false
ide.includes.fallback=wprogram.h
ide.extension=ino
ide.extension.fallback=pde
ide.versionGTEQ=160
ide.exe=arduino.exe
ide.builder.exe=arduinobuilder.exe
ide.builder.name=Arduino Builder
ide.hosts=atmel
ide.url=https://www.visualmicro.com/page/Download-Arduino-Or-Other-Supporting-IDEs.aspx
ide.help.reference.path=reference
ide.help.reference.path2=reference\www.arduino.cc\en\Reference
ide.help.reference.serial=reference\www.arduino.cc\en\Serial
ide.location.preferences.portable={runtime.ide.path}\portable
ide.location.preferences.arduinoData={runtime.sketchbook.path}\ArduinoData
ide.location.preferences=%VM_APPDATA_LOCAL%\arduino15\preferences.txt
ide.location.preferences_fallback=%VM_APPDATA_ROAMING%\arduino15\preferences.txt
ide.location.contributions=%VM_APPDATA_LOCAL%\arduino15
ide.location.contributions_fallback=%VM_APPDATA_ROAMING%\arduino15
ide.contributions.boards.allow=true
ide.contributions.boards.ignore_unless_rewrite_found=true
ide.contributions.libraries.allow=true
ide.contributions.boards.support.urls.wiki=https://github.com/arduino/Arduino/wiki/Unofficial-list-of-3rd-party-boards-support-urls
ide.create_platforms_from_boardsTXT.teensy=build.core
vm.debug=true
software=ARDUINO
ssh.user.name=root
ssh.user.default.password=arduino
ssh.host.wwwfiles.path=/www/sd
build.working_directory={runtime.ide.path}\java\bin
runtime.tools.vm_web_debugger.path={vm.platform.root.path}/../../Micro Debuggers/WebDebugger
recipe.hooks.vmdeploy.vm_web_debugger_postupload.1.pattern="{runtime.tools.vm_web_debugger.path}/DeployMicroWebserver.exe" "{sketch_path}" "{serial.port}" "{runtime.hardware.path}\.."
recipe.hooks.vmlaunch.vm_web_debugger_preopen.1.pattern=notepad.exe "{sketch_path}\__vm\vmWebDebugger\Start-WebServer.bat"
recipe.hooks.vmlaunch.vm_web_debugger_preopen.2.pattern={sketch_path}\__vm\vmWebDebugger\Start-WebServer.bat
ide.debug_menu.debugger_type=Debug
ide.debug_menu.debugger_type.none=Off
ide.debug_menu.none.debug.tool=no_debug
ide.debug_menu.debugger_type.universal=Serial
ide.debug_menu.universal.debug.tool=universal
ide.debug_menu.debugger_type.hwdebugger=Hardware
ide.debug_menu.hwdebugger=Debugger
ide.debug_menu.hwdebugger.custom_debugger=Manual/Custom
ide.debug_menu.hwdebugger.custom_debugger.debug.tool=dbg_external
ide.meta_custom_debugger.sentence=Provides a build that includes debug defines and will launch a custom debugger if one is provided.
ide.meta_custom_debugger.paragraph=This is option is for advanced use. It is recommended that a pre-configured debugger be selected when available in this list. Usage: Optionally add a customer debugger to the project. A 'debugger_launch.json' file shares the same command syntax that is used by the VsCode debugger. Custom debuggers can be targeted at a board and/or variant and/or configuration name. IE: [variant].[configuration_name][.]debugger_launch.json
ide.meta_custom_debugger.reference.usage.url=https://github.com/Microsoft/vscode-cpptools/blob/master/launch.md#customlaunchsetupcommands
ide.meta_custom_debugger.reference.connect.url=https://docs.microsoft.com/en-us/visualstudio/debugger/create-custom-views-of-native-objects?view=vs-2019
ide.compiler_flags_no_opt=-O0
ide.debug_menu.vm_disable_optimization=Disable Optimization
ide.debug_menu.vm_disable_optimization.vm_disable_opt_default=Default Optimization
ide.debug_menu.vm_disable_optimization.vm_disable_opt_proj=No Project Optimization
ide.debug_menu.vm_disable_opt_proj.vm_disable_opt_project={ide.compiler_flags_no_opt}
ide.debug_menu.vm_disable_optimization.vm_disable_opt_proj_libs=No Project + Libraries Optimization
ide.debug_menu.vm_disable_opt_proj_libs.vm_disable_opt_project={ide.compiler_flags_no_opt}
ide.debug_menu.vm_disable_opt_proj_libs.vm_disable_opt_libraries={ide.compiler_flags_no_opt}
ide.debug_menu.vm_disable_optimization.vm_disable_opt_all=No Optimization
ide.meta_vm_disable_opt_all.sentence=Disable compiler optimization for all sources:- Project, Library and Platform.
ide.meta_vm_disable_opt_all.comment=After switching between 'No Optimization' and other optimization values, please click "Solution Clean" or switch off (or cycle) 'vMicro>Compiler>Shared Cache For Cores'. NOTE: Changing optimization settings can cause build errors or result in overly large programs.
ide.debug_menu.vm_disable_opt_all.vm_disable_opt_project={ide.compiler_flags_no_opt}
ide.debug_menu.vm_disable_opt_all.vm_disable_opt_libraries={ide.compiler_flags_no_opt}
ide.debug_menu.vm_disable_opt_all.vm_disable_opt_core={ide.compiler_flags_no_opt}
ide.appid=arduino16x
location.sketchbook=C:\Users\Frank\Documents\Arduino
build.core.path=C:\Program Files (x86)\Arduino\hardware\teensy\avr\cores\teensy3
vm.core.include=arduino.h
vm.boardsource.path=C:\Program Files (x86)\Arduino\hardware\teensy\avr
runtime.platform.path=C:\Program Files (x86)\Arduino\hardware\teensy\avr
vm.platformname.name=teensy3
build.arch=TEENSY3
debug.tool=no_debug
build.usbtype=USB_SERIAL
build.fcpu=120000000
build.flags.ldspecs=
build.keylayout=US_ENGLISH
vm.runtime.compiler.cached_cores_path=C:\Users\Frank\AppData\Local\Temp\VMBCore\arduino16x
vm.runtime.compiler.showwarnings=false
vm.runtime.compiler.showwarnings_core=true
vm.runtime.compiler.showwarnings_library=false
vm.runtime.upload.verbose=false
vm.runtime.upload.verify=false
runtime.vm.ide.platforms.path=c:\program files (x86)\microsoft visual studio\2019\community\common7\ide\extensions\53lzl3xe.1x1\Micro Platforms
runtime.vm.ide.tools.openocd.path={runtime.tools.openocd-0.9.0.path}
runtime.vm.openocd.path={runtime.tools.openocd-0.9.0.path}
vm.runtime.build.intermediate_output_path=C:\Users\Frank\Documents\Arduino\TeensySerialBridgeV1\Release\
vm.runtime.build.final_output_path=C:\Users\Frank\Documents\Arduino\TeensySerialBridgeV1\Release\
compiler.always_include_sketchfolder=true
compiler.always_include_sharedprojectfolders=true
vm.runtime.compiler.auto_discover_includes=true
vm.runtime.compiler.auto_discover_includes_shallow=true
vm.runtime.compiler.allow_library_debugging=false
vm.sketch_ino_cpp_name=TeensySerialBridgeV1.cpp
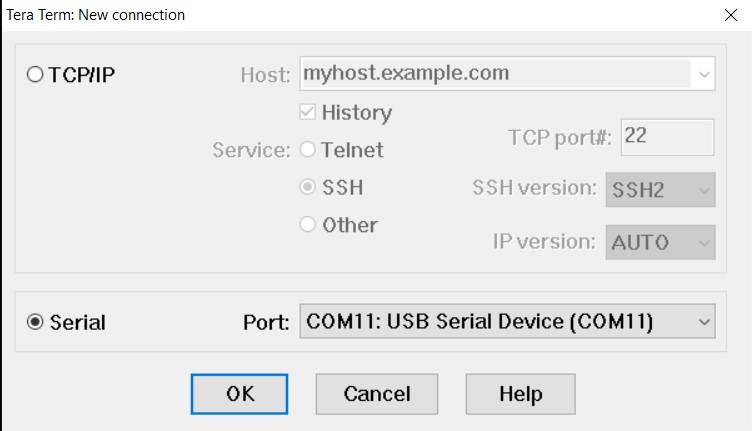
serial.port.file=COM11
serial.port=COM11
serial.port.num=11
port.caption=COM11 - USB Serial Device
Caption=USB Serial Device (COM11)
ClassGuid={4d36e978-e325-11ce-bfc1-08002be10318}
CompatibleID.value0=USB\Class_02
ConfigManagerErrorCode=0
ConfigManagerUserConfig=False
CreationClassName=Win32_PnPEntity
Description=USB Serial Device
DeviceID=USB\VID_16C0&PID_0483\3016580
HardwareID.value0=USB\VID_16C0&PID_0483
Manufacturer=Microsoft
Name=USB Serial Device (COM11)
PNPClass=Ports
PNPDeviceID=USB\VID_16C0&PID_0483\3016580
Present=True
Service=usbser
Status=OK
SystemCreationClassName=Win32_ComputerSystem
SystemName=FRANKNEWXPS15
vid=0x16C0
pid=0x0483
vidpid=16C00483
vid_pid=0x16C0_0x0483
iserial=3016580
extra.time.local=1633459396
extra.time.utc=1633473796
extra.time.dst=-14400
extra.time.zone=14400
serial.port.caption=COM11 - USB Serial Device
serial.Caption=USB Serial Device (COM11)
serial.ClassGuid={4d36e978-e325-11ce-bfc1-08002be10318}
serial.CompatibleID.value0=USB\Class_02
serial.ConfigManagerErrorCode=0
serial.ConfigManagerUserConfig=False
serial.CreationClassName=Win32_PnPEntity
serial.Description=USB Serial Device
serial.DeviceID=USB\VID_16C0&PID_0483\3016580
serial.HardwareID.value0=USB\VID_16C0&PID_0483
serial.Manufacturer=Microsoft
serial.Name=USB Serial Device (COM11)
serial.PNPClass=Ports
serial.PNPDeviceID=USB\VID_16C0&PID_0483\3016580
serial.Present=True
serial.Service=usbser
serial.Status=OK
serial.SystemCreationClassName=Win32_ComputerSystem
serial.SystemName=FRANKNEWXPS15
serial.vid=0x16C0
serial.pid=0x0483
serial.vidpid=16C00483
serial.vid_pid=0x16C0_0x0483
serial.iserial=3016580
serial.port.iserial=3016580
build.project_name=TeensySerialBridgeV1.ino
build.project_path=C:\Users\Frank\Documents\Arduino\TeensySerialBridgeV1
sketch_path=C:\Users\Frank\Documents\Arduino\TeensySerialBridgeV1
ProjectDir=C:\Users\Frank\Documents\Arduino\TeensySerialBridgeV1\
build.path=C:\Users\Frank\AppData\Local\Temp\VMBuilds\TeensySerialBridgeV1\teensy35\Release
vm.runtime.compile.skip_library_file_if_exists_in_project=true
vm.runtime.compiler.auto_discover_includes_cache=true
build.vm.build.vmdebug=0
build.vm.build.isgdb=0
build.vm.build.optimised=1
vm.last.buildpath=C:\Users\Frank\AppData\Local\Temp\VMBuilds\TeensySerialBridgeV1\teensy35\Release
build.architecture=hardware
vmresolved.compiler.path=C:\Program Files (x86)\Arduino\hardware\tools\
vmresolved.tools.path=C:\Program Files (x86)\Arduino\hardware
Compiling 'TeensySerialBridgeV1' for 'Teensy 3.5'
Using previously compiled file: C:\Users\Frank\AppData\Local\Temp\VMBuilds\TeensySerialBridgeV1\teensy35\Release\pch\Arduino.h.gch
Program size: 50,268 bytes (used 10% of a 524,288 byte maximum) (0.84 secs)
Minimum Memory Usage: 5316 bytes (2% of a 262136 byte maximum)